基于单片机和L297/L298芯片的步进电机控制驱动器设计
时间:04-29
来源:互联网
点击:
为500pps、1000pps、2000pps 。RXD,TXD 已由MAX232电平转换接出串口。此外,步进电机其启动,停止的频率较低,一般在100-250Hz之间,而最高运行频率要求较高。通常为1-3kHz,为使其在启动、运行和停止整个过程中,这采用常用的离散办法来逼近理想的近似梯形的升降速曲线,如图5所示。
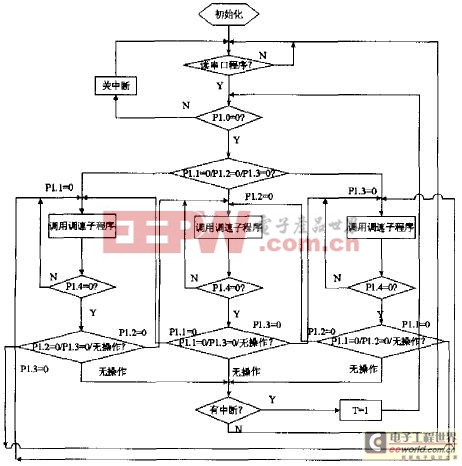
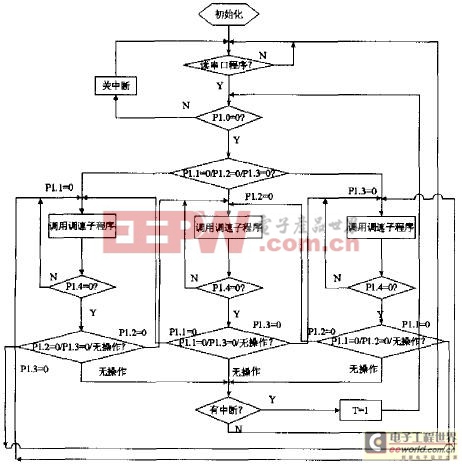
把各离散点的速度所需的装载值用公式转化为各自所需的定时时间固化在系统的ROM 中,这里用TH0=(65536-time)/256,TL0=(65536-time)%256来计算装载值,time表示各阶梯所需定时时间。该程序主要由控制主程序、加减速子程序组成,主程序框图如图4所示。
5 结论
本文创新点在于提出应用单片机和L297、L298集成电路构成步进电机控制驱动器。使之具有元件少。可靠性高、占空间少、装配成本低等优点。另外,在上面提出的在加减速程序中定时器的装载值用式子计算不精确,这两条赋值要执行不少的时间。具体做的时候。可直接把初值计算出来或把除号用相加来计算。
- 高压大电流达林顿晶体管阵列系列产品(ULN2003A)及其应用(06-19)
- 自动跟踪太阳光伏发电设备控制器的设计(06-22)
- 两款直流电机功率驱动芯片及其应用(08-05)
- 基于CS5460A芯片的电网电流表设计(11-12)
- 入门指导:步进电机正反转处理方案 (12-09)
- 应用于生活和生产的二相混合步进电机驱动研究(12-15)