变频器在转炉倾动中的应用
1 转炉传动系统特点
转炉设备是炼钢厂的关键生产设备,其炉体外形如图1示。转炉像一个“挂着的水桶”。转炉系统主要电力传动设备包括炉体倾动的电力传动设备及氧枪传动的电力控制设备。下面介绍炉体倾动的电力传动设备。
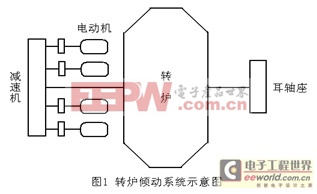
在大中型转炉系统中,炉体倾动部分一般采用四台倾动电机,通过减速机刚性连接,并采用全悬挂固定方式和扭力矩吸收方式。
炼钢厂转炉倾动装置在实际生产操作过程中,需对转炉倾动装置进行频繁的起动、制动及加减速操作,所以对倾动装置的控制精度及系统的响应时间有很高的要求。转炉倾动负载特性及电动机运转状态分析如下:
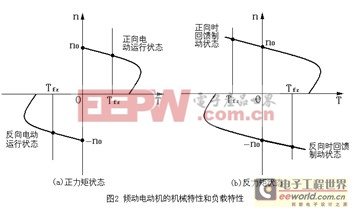
根据转炉控制工艺要求,转炉的倾动角度为正反360°,当转炉炉口与炉底方向轴线与地平面垂直时为垂直状态,故转炉倾动负载力矩为角度的函数,即Tfz=f(θ),属于反阻性的位能负载。另外,根据工艺设计说明,转炉按正力矩设计,即转炉的耳轴下部比上部高,下部比上部重,从而保证转炉控制系统的稳定性。在转炉倾动装置的实际操作中,进行倒渣或出钢时,可能出现负力矩。当转炉炉体处于正力矩状态时,电动机处于电动运行状态,当转炉炉体处于负力矩状态时,电动机处于发电运行状态,此时电动机处于回馈制动状态,倾动装置的驱动电动机的机械特性和负载特性如图2所示:
2转炉倾动控制系统的基本要求
(1)四台电动机同步启动、制动及同步运行,根据要求转炉可以在0.2~1.0r/min之间进行倾动速度调节,转炉可以做±360°旋转。
(2)当转炉正在出钢、出渣时,交流电源系统发生停电故障,此时利用UPS电源将4台制动器打开,转炉依靠自重复位, 转炉处于安全位置。
(3)当转炉出现塌炉等事故时,倾动机械的机电设备能短时过载,转炉以0.2r/min速度旋转,倾动转炉倒出炉内装盛物,然后进行事故处理。
(4)转炉为全正力矩设计,即在整个工作倾动角度内由0°~士180°方向倾动均为正力矩。
(5)为防止电动机突然启动对设备的冲击,转炉开始倾动时电动机转速应从零开始逐渐加速,从零到正常速度的加速时间是2s。
(6)由于制动器制动力矩较大,为了防止制动时对设备的冲击,转炉制动时应先通过能耗制动将电动机减速,当转炉倾动速度接近零时,制动器失电制动,制动时间为2S。
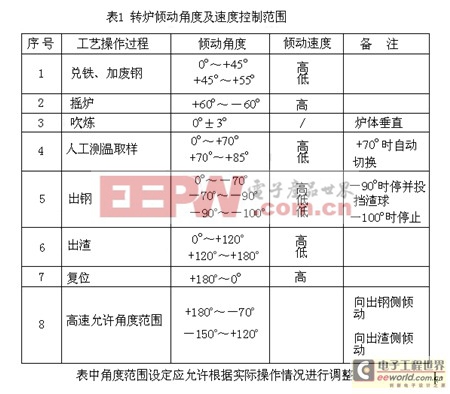
(7)转炉冶炼工艺过程转动角度及速度控制范围要求见表1。
3 山东某钢铁集团50T转炉主要控制难点
3.1主要控制难点
转炉控制主要完成炉前的炉门动作和炉体的倾动操作,炉后倾炉和出钢钢包车、出渣渣车操作,烟罩的升降操作和冷却水流量、压力联锁控制,氧枪的升降操作和氧枪定位及冷却水流量压力联锁控制,氧枪横移换枪操作,上料称重和进料操作,并完成转炉水冷烟罩、水冷炉壁、水冷氧枪等水冷系统多个测温点温度变化的实施数据采集以及冷却水系统压力、流量等实时数据采集监视和超限及事故报警。通过以太网实现PLC和操作站之间的实时数据传送,由人机界面完成生产过程监控。 图3为转炉现场图。

其中,四台转炉倾动电机的控制是该项目中技术难度最大的课题,要求必须做到快速响应,控制精度、安全可靠性能要求比较高。设计采用的传动控制装置是风光 JD-BP32系列变频器产品,型号为 JD-BP32-315T(315kW/380V),较好地解决了以上难题。
3.2转炉倾动变频控制方式选择
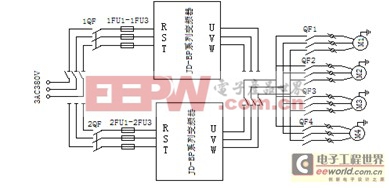
根据近几年转炉倾动控制系统的设计和应用情况,设计单位针对“一拖四”控制方式(即一台变频器拖动四台电动机)和“四拖四”主从控制方式进行了认真的比较,认为“一拖四”的控制方式,系统简单,易编程调试和维护,从安全、合理的角度考虑,每座转炉另外设一套变频器装置作为备用,以化解转炉正常生产时,因变频器故障而带来的停产。最终设计单位确定了四台电动机采用“一拖四”控制方式。转炉倾动主回路如图4所示。
3.3转炉倾动变频控制特点
(1)再生能量的处理:对于转炉倾动这种负载,变频器选用的最重要原则之一是:所选变频器必须具有在满载或过载时输出转矩恒定的高性能变频器,以保证转炉生产的安全性。另外要具有再生发电制动功能。为了保证转炉生产的连续性,采用传统的制动单元和制动电阻,而不采用回馈单元,处理电机的再生发电。
(2)开抱闸的控制:转炉倾动在控制过程中,应防止出现“溜车”故障。利用PLC控制程序,使抱闸在系统起动后电机转矩建立到足够大时松开,大大提高了系统应用的可靠性。
3.4转炉倾动控制系统操作
(1)三地操作:根据炼钢工艺的要求,转炉倾动需三地控制,分别是主控室主操作台控制、转炉炉前操作台控制、转炉炉后操作台控制。主控室主操作台控制:在主控室通过主操作
- 变频器和变频电源的工作原理及区别介绍(12-09)
- 变频器应用时的12个技巧(12-08)
- 变频器使用中的三大误区(12-08)
- 变频器工作原理及控制方式介绍(12-08)
- 变频器开关电源的特点分析(12-07)
- 维修变频器常识:开关电源电路(12-06)