变频器知识大全:控制篇
时间:06-25
来源:互联网
点击:
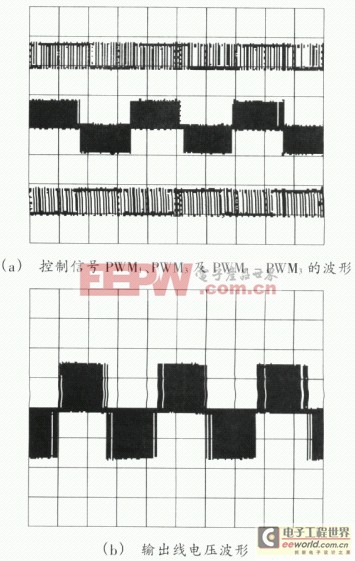
可以得到usref的角度θ,然后计算usref在两相静止坐标系α,β轴上的投影usα及usβ,有了θ可以同时计算出参考电压矢量所在的扇区/N,根据已知量由公用值求取两相邻电压矢量的作用时间T1、T2和T0,然后给DSP内部的3个全比较寄存器CMPRx(x=1,2,3)进行赋值,产生相应的5VPWM波形。 图4:SVPWN中断子程序流程图。 4 实验结果 根据前面介绍的系统硬件电路和软件控制算法,对制作的原理样机进行了实验研究。实验测试了异步电动机空载稳态运行情况,以此来检测原理样机的可行性,对实验结果进行了波形记录,300 Hz稳态运行时其PWM控制波形和测得的异步电机实测线电压波形如图5所示。 图5:300Hz时控制器输出的控制波形和实测电机线电压波形。 实验用高频电机的参数如下: 额定电压Un=220V,额定电流In=1.5A,额定频率f=400Hz,异步电机的极对数=1,额定功率Pe=800W,额定空载电流0.75A。 5 结语 以TMS320F240数字信号处理器为核心构成的数字控制器是一个信号处理系统,该系统可以完成信号的检测、滤波、整形,核心算法的实时完成以及驱动信号的产生,系统的监控、保护等功能,相对于一般的单片机构成的系统,它的处理速度快、实时性能比较好,也易于选择和配合,同时集测量、监控、保护于一身,可与上位机通信,具有很高的使用价值。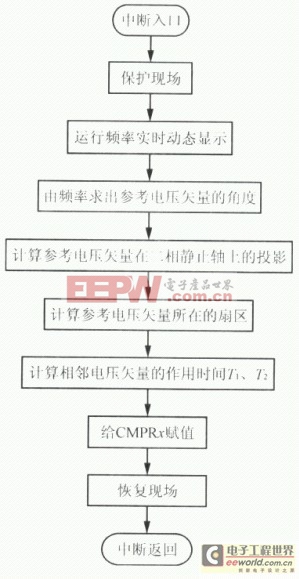
- 变频器和变频电源的工作原理及区别介绍(12-09)
- 变频器应用时的12个技巧(12-08)
- 变频器使用中的三大误区(12-08)
- 变频器工作原理及控制方式介绍(12-08)
- 变频器开关电源的特点分析(12-07)
- 维修变频器常识:开关电源电路(12-06)