基于Simulink库仿真的单相逆变电源调节器设计
通过图8,可以很明显的看到,当负载特性发生变化时,电流波形和输出电压波形会发生明显的变化。当负载为阻性载时,输出电压电流均为正弦信号。当负载为整流载时,输出电压电流信号出现一定的失真。
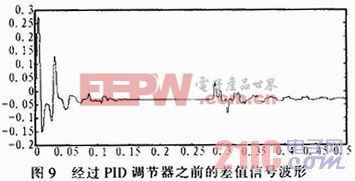
如图9所示,在最开始进入调节器时,输出电压与实际要求的电压差值很大,但在闭环中,经过PID的多次调节之后,可以很清楚的看到最后两者之间的差值稳定趋近于0。从开始到最后趋近于0的整个动态过程反应了PID调节器的调节快慢,稳定等参数,从上图可以清楚的看出此调节器的鲁棒性强,动态响应快。
4 将建模思想移植到实际电路中
建模的目的主要是为了验证设计的方案是否可行,如果可行,便可以设计硬件电路来实现此方案,可以花最少的代价来完成控制器的设计。
硬件平台:DSP2812+10K高频UPS模块
根据实际经验修改PID的参数,使输出能够在最快最稳的情况下达到预定值。
通过实际的调试,瞬时环中:P=0.6,I=0.04,均值环中,P=0.3,I=0.072,D=0.001。此时系统稳定,实际的输出波形如图10所示。
实际要求输出电压为220V,负载采用的是整流载。上图是阻性载往整流载切换时的输出电压与输出电流波形图。
从图中,可以看出,此PID控制器能够快速稳定的将输出电压值稳定在实际所要求的200 V左右,说明了此调节器动态响应快,有交强的鲁棒性。
5 结束语
PID调节器是逆变器中不可或缺的部分,PID调节器的好坏直接影响到逆变器的输出性能和带载能力。文中构建了10 KVA的单相SPWM逆变器的Simulink模型,负载采用纯阻性载和整流载分别进行仿真。仿真结果表明,在不同的负载情况下,该控制器鲁棒性强,动态响应快,输出电压总谐波畸变低。将此建模思想移植到10 K模块化单相UPS电源上,控制精度和准度,均能达到预期的效果。
调节器 设计 逆变电源 单相 Simulink 真的 基于 相关文章:
- 开关调节器的输出纹波和开关瞬变(12-06)
- 集成式电源管理单元简化基于FPGA的系统(02-19)
- 隔离式放大器是如何代替光耦合器/分流调节器的(01-17)
- 光伏发电用的功率调节器及其高效率化技术(12-14)
- 光伏离网逆变器的设计(10-25)
- 正确运用DC-DC降压/升压调节器进行设计(10-08)