采用Motorala单片机MR16的全数字化的UPS设计
随着计算机网络技术、全球化通信技术和高精尖的精密加工工业的发展,对电源的要求越来越高。为确保供电的可靠性和稳定性,UPS正越来越广泛地被应用到国民经济的各个领域。本文介绍了一种基于Motorala单片机MR16的全数字化的UPS设计方法,根据设计思想制作了一台样机,得到了较好的实验结果。
1 主电路的设计
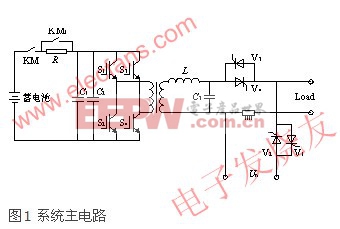
系统主电路主要包括蓄电池、逆变电路和切换电路3部分,逆变部分采用电压型全桥逆变结构,如图1所示。蓄电池电压经全桥逆变电路逆变,再经工频变压器升压和滤波后输出。逆变电压或电网电压Un通过切换开关向负载供电。系统设计要求为直流侧输入电压220V,额定交流输出电压为220V/50Hz,额定容量5kVA。
由图1可见,在蓄电池和滤波电容之间设计了由R和继电器KM1组成的合闸软启动电路,是为了防止在开机瞬间蓄电池对电解电容C1充电所产生的冲击电流而设的。KM1由单片机控制,通常单片机在复位后延时一段时间,检测直流母线电压达到一定值后,再使KM1吸合,短接限流电阻R,完成合闸软启动,延时时间一般取3~5倍的电容C1的充电时间常数。C1为直流侧的大滤波电容,能有效减少工作时直流母线电压中的脉动交流幅值,并能短时贮存操作切换开关时反馈的电感贮能,抑制由此引起的过压。C2为高频无极性滤波电容,因为,在高频逆变电路中电解电容的等效串联阻抗会影响开关电流的能量吸收,所以,有必要在C1两端再并联此电容。
2 系统控制的实现
系统的中央控制器由Motorola公司的MR16单片机完成。逆变器的输出电压经交流电压传感器反馈给单片机AD接口,经单片机采样及闭环控制运算,获得相应的SPWM控制信号输出。该单片机同时完成对电网电压的采样以判断电网故障与否,根据判断再控制切换电路完成电网电压与逆变器电压的相互切换。
2.1 直流侧电压的采样
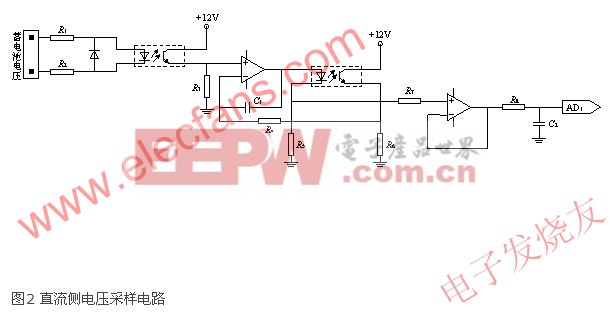
为了保护蓄电池,防止过度放电,需要对直流侧电压进行实时检测。直流侧电压的采样电路有多种形式,为了提高系统的可靠性,最好对主电路和控制电路进行电隔离。本系统对直流侧电压的采样电路如图2所示,为了使主电路和控制电路隔离,并且不增加控制电路的难度和复杂度,本文采用了双光耦隔离的采样电路。直流电压经过光耦隔离降压后输入到单片机的AD采样口,这样就能够实现高精度的直流电压隔离采样。
2.2 交流输出电压的采样
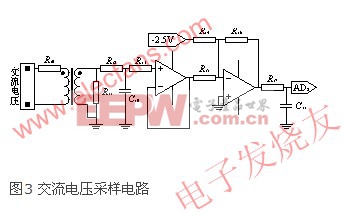
交流输出电压的采样也可以采用光耦采样的方法,只须再增加一路完全一样的电路作为负电压采样即可,但这样增加了电路的复杂程度。由于交流电压是作为反馈电压输入,其采样精度势必影响输出电压的控制精度,所以,系统采用TVA1412电压传感器,其采样电路如图3所示,既起到了电隔离作用又保证了较高的采样精度。交流电压经过TVA1412的传输比为R10/R11。由于变压器对交流电压采样必然有正负之分,而单片机的输入只能为正,故使用-2.5V基准电压将输入信号采样值抬高2.5V,以保证输入单片机采样口的电压为正。
2.3 锁相同步的实现
在UPS的设计中,锁相同步技术是衡量UPS系统性能好坏的一个重要指标。UPS能够实现市电旁路供电与逆变器供电之间的可靠转换的前提是,市电的交流电压与逆变器的交流输出电压必须同频率、同相位和同幅值。如果UPS在执行转换的瞬间,由于两路交流电源的电压值不同,因而会出现瞬态电压差ΔU,如果用户在具有过大的ΔU情况下执行切换操作,有可能会对负载产生电流冲击。
逆变器正弦波的输出,是通过建立一个正弦表,在中断程序中由正弦指针读取正弦表值,并进行相应脉宽计算产生SPWM波形输出。正弦指针为零时对应的输出正弦波相位也为零,所以,当检测到电网零相位点时,可以通过比较正弦指针的值来判断是否锁相,指针为零则表明逆变器正弦波输出与电网电压波形锁相同步,否则,就要通过移相跟踪电网电压相位。但是,如果一检测到零相位就将正弦指针清零,势必会引起较大的冲击电流,并且这样抗干扰能力弱,所以,系统采用逐次逼近锁相方式。具体方法是:每检测到一次零相位点,就判断当前正弦指针是否为零,为零表明已经锁相,不为零,则判断正弦
指针处于正弦表的正半周还是负半周,位于正半周时就将正弦指针减1,位于负半周就将正弦指针加1,如此反复循环直到锁相为止。显然,锁相同步要在PWM中断程序中实现。
2.4 切换电路的设计
现在常用的方法是用晶闸管作切换开关,普通晶闸管的开通时间为几μs,关断时间约为几百μs,开、关时间之和不超过1ms。图1中采用晶闸管反并联连接结构,由于母线上流过的是正弦全波,以V1、V2为例,就必然形成在正弦波的正半周V2导通、V1关断
UPS 设计 数字化 MR16 Motorala 单片机 采用 相关文章:
- 三种充电措施提高apc ups电源性能(12-09)
- UPS电源与传统冗余电源的区别(12-09)
- 基于双变换UPS的全桥IGBT技术研究(12-09)
- UPS电源急需信息化协助克服难题(12-09)
- UPS给出额定有功功率的误区(12-09)
- 飞轮储能技术在UPS系统中的应用(12-09)