H型双极模式PWM控制的功率转换电路设计与分析
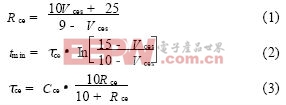
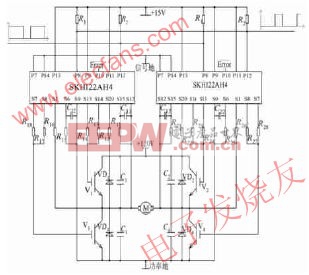
PWM信号的传输。直接驱动法适用于小容量的不加保护的IGBT的场合。光耦隔离驱动法对光耦的要求较高,要求光耦速度快,绝缘耐压高于电源电压,共模抑制比大。 SEMIKRON公司的SKHI22AH4模块是应用变压器驱动原理的驱动器件。当SKHI22AH4模块驱动IGBT时,它的最大工作频率可达100kHz,完全解决了限制使用频率问题。SKHI22AH4模块驱动IGBT的电路原理图如图2。图2中虚线方框是SKHI22AH4模块结构简图,模块中分初级和次级两个部分,这两个部分是绝缘的,使得驱动电路具有良好的输入输出电隔离能力;模块有2个input、2个output,一个input对应一个output,input是变压器初级,output是变压器次级;SKHI22AH4模块中还有针对短路、过流和电压不稳等错误的测量装置和错误信息储存装置,用来实现多种电路保护功能。SKHI22AH4模块的工作原理是:PWM控制信号加在变压器初级,变压器次级输出放大的驱动信号驱动IGBT。SKHI22AH4模块的供电电压是+15V,当其驱动2MB1300D-140型号的IGBT时,其驱动输出的导通电压可达+14.2V、关闭电压可达-2V,完全满足减小IGBT动态功耗对+Vge、-Vge的要求。为了减小ton、toff,在允许的范围内取Ron=3.38,Roff=3.38。在力求减小功率损耗的原则下,在设计电路保护功能过程中选择其外围元器件。 图2SKHI22AH4模块驱动IGBT的原理图 SKHI22AH4的主要电路保护功能设计: 1)短路保护功能 在C极和E极间容易出现短路的现象。短路时,电流增大,IGBT的功率损耗迅速增大(随着电流的平方增大),严重时会造成IGBT的损坏。因此,需要对IGBT进行短路保护。如图2所示,通过对C极和E极的电压的比较,就实现了对C极和E极间的短路保护。实现短路保护,就要合理确定Rce和Cce的值。具体步骤如下: ①确定Vces的值。Vces既不能过大也不能过小,过大会增加IGBT动态功率损耗,过小会减弱短路保护能力,一般取5.6V。为了减小IGBT的动态功率损耗,可以适当减小,但不能小于3.5V。这里取Vces=4V。 ②确定Rce。由公式(1)求得Rce=13Ω。 ③确定tmin。由SKHI22AH4模块的特性知,tmince=470pF。 2)互锁保护功能 SKHI22AH4模块具有互锁功能,以防止H桥同侧臂的2个IGBT同时导通。互锁功能就是:在H桥同侧臂的2个IGBT中,一个IGBT关闭后要有一段延时,另一个IGBT才能开通。互锁的锁定时间ttd=2.7+0.13Rtd(Rtd为互锁电阻),2.7μs是由于SKHI22AH4模块中已经集成了一个互锁电阻产生。取Rtd=08,则ttd=2.7μs。 3)错误监测 SKHI22AH4模块具有错误监测功能,它可以对短路、过流、电压不稳等错误进行监测。当错误发生时,SKHI22AH4模块停止运行,并将错误信号存储在Errormemory中,直到错误排除,才能从新运行。 按照上述驱动电路设计,可得SKHI22AH4模块的驱动波形,如图3所示。 图3SKHI22AH4模块输入输出的波形图 H型双极模式PWM控制的功率转换电路 经过上述设计,得H型双极模式PWM控制的功率转换电路原理图,如图4所示。经实验测试得,图4所对应的功率转换电路中IGBT的ton=1.8Ls、toff=1.4Ls,则IGBT的开关时间为3.2Ls。 图4H型双极模式PWM控制的功率转换电路原理图 实验 设计完H型双极模式PWM控制的功率转换电路后,还要确定合理的PWM开关频率,才能进一步减小功率损耗、实现H型双极模式PWM控制在大功率伺服系统中的应用。 PWM开关频率的计算 合理的开关频率不但可以进一步减小功率损耗、提高效率,而且还可以使系统性能与连续系统的性能相差无几。综合来看,开关频率的确定,受到很多相互矛盾的因素决定: ①为了改善静摩擦对伺服系统低速性能的影响、使得电动机在零位处于动力润滑状态,因 此双极模式PWM控制工作时考虑微振特性的开关频率应满足公式(4); ②为了使开关频率不至于对系统的动态性能产生不良影响,频率应远大于伺服系统本身的 通频带fc,一般应满足经验式(5); ③为了避免引起共振,开关频率应该高于系统中所有回路的谐振频率; ④为了提高电动机的利用率,必须限制电流脉动量$Ia,应该满足式(6); ⑤开关频率的上限要受到IGBT的开关损耗和开关时间的限制,应满足经验式(7)。 以某三轴飞行仿真转台方位轴伺服系统为例进行计算,该转台是我们目前国内功率最大的转台之一,功率为11000W,其中方位轴伺服系统的功率为7200W。三轴飞行仿真转台方位轴电动机参数如下:力矩系数KT=82.3N?m/A,供电电压Us=+120V,电枢电阻Ra=2.48Ω,电枢电感La=0.019H,电机轴上静摩擦力矩Tf=21010N?m,系统通带频率fc=34Hz,额定电流IN=60A,启动电流Is≈IN,αs=Is/IN≈1,Te=La/Ra=0.0079。 由式(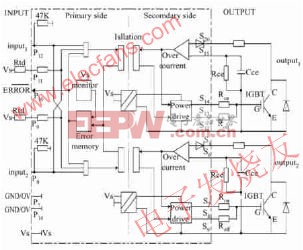


转换 电路设计 分析 功率 控制 模式 PWM 双极 相关文章:
- 1200V CoolSiCTM MOSFET兼具高性能与高可靠性(06-28)
- 技术浅谈:DC/DC转换器中电感器对待机时间的影响(12-12)
- 电源系统管理中数字可编程 DC/DC 转换器的精确度探讨(12-12)
- 基于无线传感器节点的低功率电源转换技术方案(12-09)
- 详解设计高效的DC/DC转换器(12-12)
- 移动电源转换效率解析(12-09)