全数字化特种电源实时并机系统研究
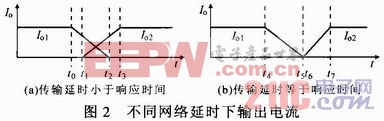
加入备用机算法可在提高并机模块功率输出的同时无需考虑模块的冗余问题,使得模块可以在较好的功率输出点,从而提高并机的输出效率。但备用机切换过程中数据延时会引起输出波动如图2所示。Io1与Io2之和为并机系统的输出波形(Io1为正常工作机的输出电流,Io2为备用机的输出电流),t0~t2(t4~t5)为工作机的关断响应时间,t1~t3(t6~t7)为备用机的上升响应时间,其中t1~t0(t6~t4)为Cm时间。当Cm在要求范围内,并机系统可视为输出恒定。当Cm大到一定程度后就会出现系统输出功率拉低的情况,此时其他电源将会承担缺少的功率输出,出现电源模块过载情况损坏并机模块,进而影响到并机系统的稳定性。所以网络选择要尽量减少其Cm,以避免出现图2b情况或者更甚。
4 软件设计
此处提到编码、译码延时由选用的控制芯片决定。该系统利用RTX实时系统内核,运用32位的ARM芯片进行系统设计和实验。
RTX内核是一个实时操作系统,可以同时运行多函数或是任务,其进程切换时间小于5μs,中断停止时间小于1.8μs(在LPC21xx上执行,系统时钟60 MHz)。RTX采用时间片抢占模式实现系统的实时操作,可通过软件对其时间片时间进行设置,实现程序流程的优化设置,并通过任务的优先级设置提高数据通讯的实时性。
由于备用电源的接入和故障机的退出都需要有较好的实时性来满足整个并机输出的稳定性,所以采用实时操作系统能很好地使用系统周期,避免因程序等待使得系统在处理数据上出现延时,影响并机输出的稳定性。
4.1 均流控制算法
图3示出均流控制算法和程序流程图。
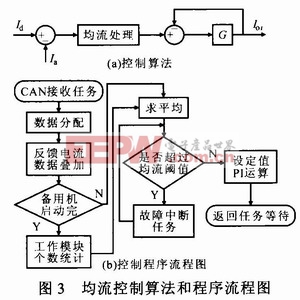
均流控制原理是在其原有的单环控制前加入均流控制,如图3a所示。图3a中,Id为系统初始设定输出值,Ia=(Io1+Io2+…+Ion)/n,Ioi为第i个模块的输出电流,G为电源模块的传递函数。均流处理环节的输入为系统设定输出与各个模块输出电流和的平均值的差值,通过均流处理对模块单环输入的额定值进行均流补偿。最终实现模块的稳压和系统各个模块间的均流。
4.2 备用机控制算法
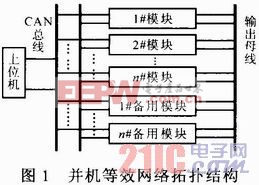
CAN总线上的数据包含均流数据、备用机启动信号等。备用机未启动前只接听总线数据,并不占用网络资源,当备用机接收到启动信号后启动工作,并开始进行数据传输,故障机退出网络,保证网络负载不变。表1为系统中模块ID的分配。
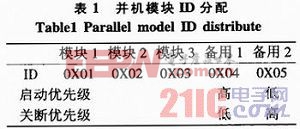
其中ID 0X01~03为正常工作用机,0X04,0X05为备用机。在4,5号机中,4号机拥有启动优先级,5号拥有关断优先级。并机网络的工作模式:1~3号机正常工作并进行数据交换以实现并机间的数据均流,而4,5号机则处于准备状态。当1~3号机有一台发生故障时,故障机关闭本机工作输出,并向备用机发送启动命令和本机工作状态,4,5号机接收到命令后即按优先级启动工作。同时,故障机发送自身ID和故障状态给上位机,便于及时排查故障。经过维修排除故障后,正常工作机则发送正常工作信号给备用机,备用机即刻停止工作,进入准备状态。工作模块工作一段时间后可以与备用机进行ID对换,以提高并机系统的暂载率,避免机器老化引起的功率输出不平衡。
5 实验
5.1 均流特性实验
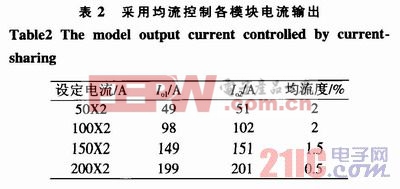
采用两台25 kW(630 A/44 V)电镀电源进行并机实验,使其额定输出达到50 kW。此实验在固定电阻负载情况下进行测量,测量数据如表2所示。由表中数据可见系统的均流误差最大为2%,满足工业产品最大均流误差不大于5%的要求。
5.2 系统实时性实验
首先对单机系统退出和进入的实时性进行实验。实验数据由TDS2012B数字示波器采集,通过origin75软件进行数据处理得到测试波形。
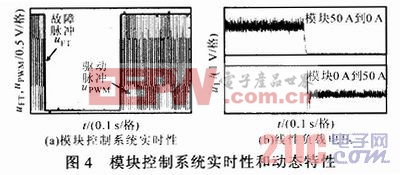
图4示出模块控制系统实时性和动态特性,由图4a可见,模块的控制动作在半个PWM周期内完成,符合实时性要求。由图4b和数据可得模块的动态响应时间约为10 ms,满足并机设计要求。
5.3 备用机调用实时性实验
备用机切换实验,采用模拟故障使工作机发出故障信号,并退出并机网络,备用机代替工作机输出功率。采用高压探头测量电阻负载在备用机切换时的电压波形,如图5所示。
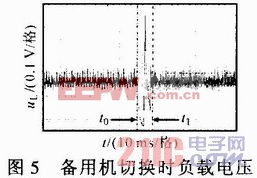
u1为线性负载电压,在t0时刻出现输出下降,即为出现故障机,t1时刻输出恢复,所以t0~t1为由故障机到备用机的功率转换时间,约为15 ms,符合设计要求。
6 结论
该方案采用CAN总线通讯实现均流信息的交换,以实现并机系统的均流设计;采用备用机算法在网络最佳工作接入点的局限下提高并机系统的功率输出。最后以ARM芯片为核心设计了实时并机控制系统,通过实验验证了此均流方案具有良好的均流效果,同时备用机切换具有良好的实时性,提高了系统并机的可靠性。
- 控制系统中常见的几种地线详解(10-13)
- VxWorks操作系统的CompactPCI测试仿真系统(12-12)
- 基于VxWorks操作系统的CompactPCI仿真系统(12-12)
- 电源系统管理中数字可编程 DC/DC 转换器的精确度探讨(12-12)
- 工程师详解测控系统仿真与测控设备软件化技术(12-12)
- 一种新型自动抄表系统数据集中器的设计(12-09)