高PF反激临界模式开关电源的环路设计
摘要:目前开关电源市场上单端反激式的开关电源占有很大的份额,控制环路的设计是反激电源中关键的步骤之一。主要对基于L6561临界(TM)模式下高功率因数(PF)单端反激式开关电源的控制环路设计进行了论述,文中通过对环路中各级的传递函数进行了定性分析和定量计算,进而给出了环路的补偿电路。通过选择合适的相位裕量来保证系统的稳定性,并通过图解法验证了该环路可以使系统具有较好的稳定性。
关键词:反激式电源;功率因数;控制环路;临界模式
由于中小功率开关电源的市场前景很好,单端反激式开关电源不仅可以实现低压输出而且可以实现高低压的电器隔离,进而提高了电源的安全性。文中主要对基于L6561的临界模式下高PF反激式开关电源的环路设计进行了论述,其中反馈回路由PC817A和TL431组成,文中对环路的补偿设计电路进行了定性分析和定量计算,通过选择合适的相位裕量保证系统的稳定性,电源通过负反馈环路来控制在不同的负载下得到稳定的电流。
1 反馈环路概述
开关电源的控制方式有两种:电流控制模式和电压控制模式,两种控制模式的传递函数有很大的不同,文中论述的是电流模式中峰值电流模式控制的环路设计。
1.1 反馈环路稳定的标准
环路稳定的标准:只要在增益为1时(即0 dB时),整个系统的相移小于360度,则系统就是稳定的,即环路是稳定的。但是如果系统的总相移和接近360度(其中总相移和为控制环路中各级产生的相移和),则可能产生以下2个问题:1)相移可能因为温度、负载或者分布参数的变化而达到360度,从而使系统产生震荡,造成环路不稳定;2)当相移越接近360度时,电源的阶跃响应(负载的瞬时变化)超调量增加,延长输出达到稳定值的时间。所以环路要留有一定的相位裕量,工程上一般相位裕量取45度左右。
1.2 常用的电流型环路补偿方法
图1给出了2种常用的电流型控制模式中的环路补偿方法。

图1(a)中补偿网络的传递函数为: ,适用于电流型控制和工作于DCM(非连续电流模式)模式下的电源。补偿网络产生的初始极点可以使控制带宽变窄,零点可以使系统在剪切频率处的相位裕量。文中采用的是图1(a)的补偿方案。
,适用于电流型控制和工作于DCM(非连续电流模式)模式下的电源。补偿网络产生的初始极点可以使控制带宽变窄,零点可以使系统在剪切频率处的相位裕量。文中采用的是图1(a)的补偿方案。
图1(b)中补偿网络的传递函数为: ,极点同样可以将控制环路的带宽变窄,而零点则是用来抵消补偿前的极点的,这样不仅可以使环路的增益曲线在较低的频率处达到0 dB,而且提高了穿越频率附近系统的相位。
,极点同样可以将控制环路的带宽变窄,而零点则是用来抵消补偿前的极点的,这样不仅可以使环路的增益曲线在较低的频率处达到0 dB,而且提高了穿越频率附近系统的相位。
2 环路补偿设计
2.1 反激变换器环路设计的特点
在反激拓扑中,由小信号模型的传递函数可知,反激中的连续模式(CCM)为二阶系统,不连续模式(DCM)和临界模式(TM)为一阶系统。
基于L6561的具有高PF的反激变换器不像一般的变换器,在这样的变换器中,控制环路带宽应当很窄,以保证在给定的半个电网周期内维持Vcomp如同原先假定的为相当良好的常数,这样才能保证高的PF;但窄的控制环路带宽会降低系统对电网和负载的瞬态响应速度,影响电路的负载和线性调整率,于是环路设计时需在两者之间折中。
2.2 环路设计
环路设计时因为误差放大器本身是工作于负反馈状态下,自身就有180度的相移,加上为满足工程设计中的不小于45度的相位裕量,所以功率部分、反馈网络和补偿网络的相移最多为135度。另外一般要求加入补偿网络后系统的环路增益曲线,在剪切频率附近的增益斜率应该为-1(即-20 dB/10倍频率),这样做的目的是因为-1的增益斜率所对应的相频曲线相位延迟较小,且变换相对较慢,可以保证当某些环节的相位发生变化时相频曲线仍然有足够的相位裕量,使得环路保持稳定。
图2给出了基于L6561临界模式下高PF反激变换器的控制环路设计电路框图。
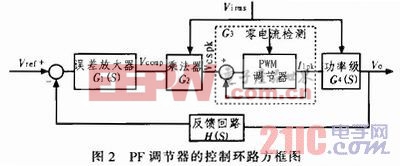
图2各个部分的传递函数如下:
L6561的内部误差放大器(E/A)补偿如图1(a)所示。于是,传递函数G1(S)是:
其中极点的频率为,可以使得存两倍电网频率处增益远小于1,而零点位于开环增益过零附近来提升相位,以保证相位裕度。
由于电网变换或负载变化将引起误差放大器的变化,其变化量为△Vcomp在乘法器输出端修正整流正弦波电压的幅值Vcx,因此,乘法器方块的传递函数为: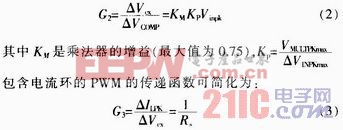
其中RS是检测电阻。
小信号分析指出,反激拓扑中电流控制模式下的功率级传递函数为: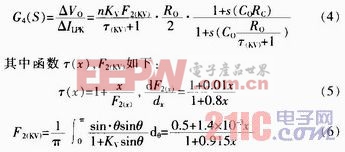
反馈网络可以有不同的结构,文中考虑的是使用光耦作为初级与次级电气隔离、TL431作为参考电压和放大器组成的结构。图3为电路采用的反馈网络电路图,增益H(S)可以写为:
其中CTR为光耦传输比。

除误差放大器,系统的开环增益G(S)为:G(S)=G2G3G4(S)H(S),误差放大器的增益G1(S)和开环增益G(S)在剪切频率处应该满足:F(S)=G1(S)G(S)=1且有45度左右的相位裕量。
3 环路参数设置和定量计算
3.1 环路参数设置
在设计控制环路时,首先选择光耦的输出晶体管工作电流Ic,一般选择较小的电流值(如1 mA),这样不仅可以延长器件寿命,而且有利于实现在两倍电网频率处保持反馈网络低增益,利于环路的稳定。因为L6561内部的参考电压是2.5 V,所以闭环工作时VE的静态值应在2.5 V附近,则R4的值可由式子计算出来:
电阻R5是光耦的限流保护电阻,同时有利于降低环路干扰,使系统不容易产生震荡。R5的计算公式为:
其中1 V是光耦两端的典型压降。为了使反馈网络可以在二倍工频处取得比较低的增益,R5的值尽量取接近式(9)计算的最大值。然后根据输出电压选择RO1和RO2:
其中2.5是TL431内部基准电压,IRO2是流经RO2的电流。
电阻R2是L6561内部运放的反向输入端电阻,用于检测叠加在VE上的纹波电压,R2是为了保证该叠加的纹波电压不会使L6561进入动态过压保护状态(即进入COMP脚的输入电流不应大于40μA,否则芯片进入过压保护状态),因此R2近似为:
与RO1和RO2并联的电容(一般为μF范围)起软启动功能,避免建立输出时电压过冲,特别是轻载。
3.2 定量计算
为了保证在半个电网周期内维持Vcomp为恒定值和电路具有较高PF值,要求控制环路的带宽应该不大于100 Hz,所以环路的带宽只能降低,设计时取整个开环电路的穿越频率为50 Hz,相位裕量大于45度。
环路的定量计算:采用Venable方法,一个零点相当于一个RC微分器,会引起相位超前,一个极点相当于一个RC积分器,会引起相位滞后。在穿越频率处,G(S)产生的相位偏移量和增益分别为PhaseG(S)50Hz和GainG(S)50Hz:
代入数据可知,G(S)在50Hz处产生的相位滞后为85度,增益为6dB。因此加入补偿后需满足:补偿网络的增益在50Hz处的增益为-6dB,且整个环路的相位裕量大于45度。画出G(S)的频谱曲线图,由G(S)的频谱曲线图可知,我们可以选择图1(a)中的补偿方案,取该零点位于10 Hz处。
加入补偿网络后,整个系统在50 Hz处产生的相位滞后为96度,即相位裕量为84度。图4、图5分别给出了G(S)和F(S)的增益曲线图和相频曲线图。
- 一位工程师对环路补偿的计算和仿真分享心得经验(12-09)
- 工程师自我养成之反激变换器控制环路仿真设计(12-09)
- TPS65142环路补偿设计考虑因素之讨论(12-08)
- 扩展电源控制环路带宽改善负载瞬态响应(12-07)
- 环路供电变送器设计权衡考量(09-25)
- 反激电源设计及应用之控制环路设计(12-25)