基于CAN总线的电流、电压变送器的设计与实现
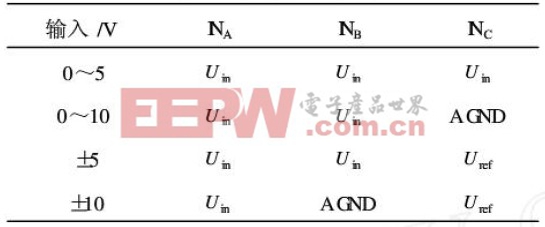
Uref=5V.
2.2CAN总线通信硬件电路设计
CAN控制器采用单片机的内置CAN控制器,其接口电路使用CAN收发器PCA82C250、电源隔离模块和高速光电隔离器6N137,并采用保护电路。PCA82C250是Philips公司生产的CAN收发器,是CAN控制器和物理总线间的接口,用来提高总线驱动和通信抗干扰能力。其差分接收器共模抑制比宽,抗电磁干扰。它与ISO11898标准兼容,速度高达1Mb/s,抗汽车环境下的瞬间干扰。它内部有总线保护电路和限流电路,并具有电流待机工作方式和降低射频干扰的斜率控制。采用PCA82C250可以最多连接110个节点,并且未上电的节点对总线无影响。
信号在传输线上远距离传送时,如果遇到阻抗不连续的情况时,就会出现反射现象使信号扭曲,通常在传输线的末端接上120Ω的终端电阻来消除反射。为了保证信号质量,PCA82C250与CAN总线的接口部分采用了一定的安全和抗干扰措施。PCA82C250的内部CANH和CANL引脚各自通过一个5Ω的电阻与CAN总线相连,该电阻可以起到一定的限流的作用,使引脚免受过电流的冲击;总线与地各自并联一个30pF的小电容,具有一定的防电磁辐射和抗高频干扰的功能;在总线和地之间分别反接一个IN4148反向保护二极管,起过压保护作用。
3 CAN智能变送节点的软件设计
3.1主程序
系统初始化主要包括I/O口、CAN控制器、中断以及用户标志数据的初始化。该过程主要对PIC18F258的基本资源进行配置定义,将复用的PORTA资源配置为通用数字I/O口,并通过设置其输入输出特性,保证MAX1166的输入、输出以及控制信号引脚都得以正确配置,开启相应的中断源,配置CAN接口,用户标志数据赋初值,初始化过程结束。通过设置模拟信号输入的相应数据通道后,单片机上电即开始进行电流、电压信号的检测。上位机一旦发送命令请求下位机回送采集数据等相关信息后,下位机马上产生中断,回送一帧数据信息。监控流程图如图5所示。
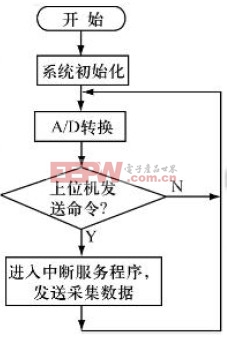
图5系统监控流程图。
3.2A/D转换模块软件设计
A/D转换是通过MAX1166实现的。MAX1166的一次转换过程可分为转换准备、模数转换和转换结果输出3个阶段。PIC18F258通过I/O口时序模拟MAX1166的控制信号,从而使MAX1166正常工作。MAX1166具体控制过程如图6所示。

图6ADC转换流程图。
3.3CAN总线通信模块软件设计
该系统设计中,变送器节点以中断方式接收上位机所发送命令,回答被放在中断服务程序中进行,数据传输方式采用CAN总线。当上位机发送命令要求下位机回送数据信息时,下位机立即进入中断服务程序(该接收中断被定义为高优先级中断),发送采集数据等基本信息。图7为CAN总线发送的流程图。

图7CAN总线发送流程图。
4 上位机通信界面
上位机采用周立功公司的PCI5121适配卡与变送器节点进行通信。测试软件采用ZLG2CANTest,通过正确设置波特率、数据通道、帧格式、帧类型以及ID,可以实现上、下位机的通信。通信界面如图8所示。

图8上位机通信界面。
5结束语
本文所设计的智能变送系统实现了通用电流、电压的检测功能,采用CAN总线通信方式。系统结构简单,安装维护方便。数据采集精度基本达到预期指标,控制精度较高。该系统通过硬件抗干扰措施和软件滤波,有望进一步提高各项性能指标。
变送器 设计 实现 电压 电流 CAN 总线 基于 相关文章:
- 环路供电变送器设计权衡考量(09-25)
- 两线制变送器微功率隔离电源设计(05-02)
- 一种电流型二线制光照强度变送器的设计(05-29)
- 电流变送器问题解决(10-10)
- 两线制变送器的原理(05-20)
- 各类变送器的特点(09-26)