基于太阳能电源的图像采集系统
随着能源危机的加剧,新能源的利用已经成为各个国家长远的发展战略。光伏能源以其可再生性和无污染的优势,被公认为今后解决能源紧缺的有效能源之一[1-2]。在供电条件不足,又需要图像监控的场合,利用太阳能为监控设备供电,不仅减少了架设电网的费用,而且提高了能源的利用率[3]。
在太阳能充电的最大功率点跟踪(MPPT)策略上,近年来出现了各种MPPT控制算法。参考文献[4-6]中提到常用的固定电压法CV(Constant Voltage)和扰动观察法PO(Perturbation and Observation)具有控制思路简单、易于实现的优点,但也存在各自的缺陷。
本文针对扰动观察法在外界环境或负载突变时,因快速扰动造成功率振荡和误判的缺点,提出了固定电压法结合扰动观察法的MPPT控制方法[7]。
在图像采集部分,由于CMOS图像传感器具有价格低廉、重量轻、功耗小等优势,采用美国Omnivision公司开发的CMOS彩色图像传感器芯片OV7620进行图像采集设计[8],给出了基于太阳能电源的图像采集设计方案。
1 系统架构
基于太阳能光伏电源的图像采集系统的结构框图如图1所示。系统主要包括太阳能电池板、防雷击电路、电压/电流采集电路、BUCK充电电路、驱动电路、蓄电池、AVR单片机、OV7620摄像头电路和串口电路。
本文重点研究了BUCK充电电路中MPPT控制算法的实现,以及基于太阳能光伏充电的图像采集系统的实现。系统的核心控制器AVR采用高性能、低功耗的ATmega16A单片机。

2 系统硬件设计
2.1 光伏电池充电控制
AVR单片机首先对采集到的太阳能电池板充电电压、电流信号进行A/D转换,得到的数字信号通过控制器进行MPPT算法处理。
BUCK电路中的开关管和续流二极管设计成相似的结构,并用一片内部自带死区产生的驱动芯片进行信号的驱动放大。
为防止瞬变的高电压破坏蓄电池,在输出电压接到蓄电池之前加上了2片具有高浪涌能力的功率缓冲芯片MBR20100。图2是光伏电池板对蓄电池的BUCK充电电路硬件原理图。
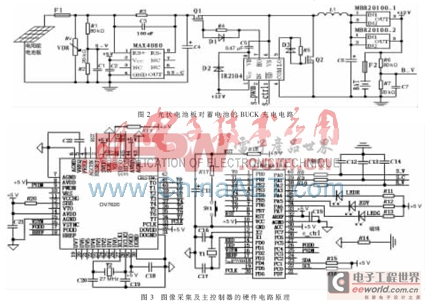
2.2 图像采集电路设计
OV7620摄像头将拍摄的模拟图像进行抗混叠滤波、放大、A/D转换以及图像的开窗等预处理,从而转换为数字图像数据。控制器通过几个同步信号按照图像采集的时序采集数字图像数据。
为了尽量减少模拟电路与数字电路之间的地线干扰,在设计中用磁珠将模拟地和数字地隔离开。图像采集及主控制器硬件电路原理图如图3所示。
3 系统的软件设计
3.1 系统的软件流程
系统的软件流程图如图4所示。
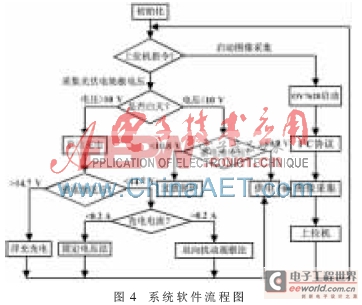
系统由上位机指令启动,实时采集电池板电压数据和数字图像数据。当检测到电池板电压大于10 V时,延迟3分钟对电池板电压进行实时监测;若3分钟后电池板电压仍大于10 V,则进入充电状态。当采集到蓄电池电压小于14.7 V时,启动电流采集电压/电流信号并根据该信号通过固定电压法和双向扰动观察法相结合的最大功率跟踪算法调整输出的脉宽信号;当检测到蓄电池电压大于14.7 V时,则进入浮充状态防止过充。
摄像头的初始化利用AVR两线串行接口TWI上I2C协议的三相写周期对0V7620的功能寄存器进行配置。通过配置相应的寄存器可以使OV7620工作于不同模式,例如要将OV7620设置为16 bit数据格式、320×240输出格式和连续扫描模式,需通过如下3个函数进行设置:
I2C_WritePhase(0x42,0x13,0x00);
I2C_WritePhase(0x42,0x14,0x24);
I2C_WritePhase(0x42,0x28,0x20)。
写寄存器的过程主要是三相传输,首先是写允许指令0x42,接着传输目标寄存器的地址,最后是要写入的数据。
图像数据的采集根据同步信号VSYNC、HREF、PCLK协调动作来完成。
上位机采用VC++软件编写图像采集界面,通过串口发送启动命令并开始接收320×240的图像数据。
3.2 MPPT控制策略
当太阳能电池板的输出功率达到最大值时,其对应的电压即最大功率点输出电压,固定电压法是将输出电压稳定在一个固定值上。电池板的输出功率会随光强和温度的变化而变化,因而该方法的控制精度低。
扰动观察法是通过将本次的电池板输出功率与上次相比较来确定增加或减少输出电压,进而实现MPPT。它存在一个缺点,即在功率追踪的过程中,光强的变化和快速扰动等因素都可能导致功率振荡和误动作,使MPPT控制达不到预期效果。
为克服上述缺点,本文提出一种新型的MPPT控制方法,系统先利用固定电压法将太阳能电池板的输出功率锁定到最大功率点(输出电压在30 V~38 V内)附近,以保证跟踪的快速性。在此基础上,再采用小步长的双向扰动观察法追踪太阳能电池板的最大功率点,进一步提高对光伏阵列的利用效率。
与一般的MPPT算法不同,当外界环境或负载发生突变时由固定电压法实现MPPT控制,从而有效地避免了因外界因素引起的误动作。而扰动观察法主要对最大功率点附近的稳态特性进行优化,扰动步长可远小于一般扰动观察法的步长,并且按照接近最大功率点的方向逐步减少,这样不仅可以提高控制的精度,而且能有效地减少系统在最大功率点附近的功率振荡现象。本文采用的MPPT算法流程图如图5所示。
在双向扰动观察法中,系统实时采集太阳能电池板的电压电流数据,计算双向扰动(PWM+△PWM或PWM-△PWM)后的功率值(Pi或Pj),并与扰动前的功率值Pnow比较,根据比较结果来确定下一步的扰动方向:当Pi>Pnow时,继续按PWM+△PWM扰动;当Pj>Pnow时,继续按PWM-△PWM扰动;当Pnow>Pi且Pnow>Pj时,调整扰动步长△PWM=0.5△PWM。当扰动步长小于系统设定的微小量ε时,说明已找到太阳能电池板的最大功率点。
- 图像采集综合评估的嵌入式指纹识别系统(二)(12-06)
- 图像采集综合评估的嵌入式指纹识别系统(一)(12-06)
- 彩色图像采集卡相关知识简介(04-30)
- 电源设计小贴士 1:为您的电源选择正确的工作频率(12-25)
- 用于电压或电流调节的新调节器架构(07-19)
- 超低静态电流电源管理IC延长便携应用工作时间(04-14)