基于PLC的50MW脉冲调制器电源控制系统
由于电网电压经常在AC380V的±5%或更大范围内波动,而现有的deQ`ing电路只能在极窄的电网电压波动范围(<1%)内工作,我们必须提供一种手段来维持大范围电网波动时的直流高压高稳定度。另一方面,现有的六台调压机为步进电机驱动的50kVA三相感应电力调压器;为了提高调压精度,实现电压的细微调节,有必要对其进行改造。
为此我们应用OMRON C200HE PLC研制了上位机-PLC电源控制系统。该系统投入运行后,经测试,直流高压电源稳定度好于0.5%。另外,这套计算机实现了对电源各主要参数进行实时监测、自动记录以及电压轨迹图形显示的功能,为操作者提供了友好的软件控制界面。
1 系统组成及基本工作原理
置于直线加速器控制室的工控机做为上位控制计算机,而置于调压机房的PLC则做为现场控制设备完成对五组交流调压电路的直接控制。为了消除速调管走廊强电磁干扰对上位计算机和PLC之间通信的影响,采用了光缆作为长距离数字信号传输的通信介质;经过Link适配器以及PLC机架上的上位连接单元完成光/电信号之间的转换。PLC直接完成对调制器交流调压控制电路的控制,以及对直流高压端的数据采集、数字滤波抗干扰处理、高压保护和报警,并实时响应上位计算机发出的命令帧(由Host Link协议规定其格式),处理上位计算机指令。这样便以PLC为中心,组成了一个数字式计算机开环/闭环控制系统。在上位计算机端可以通过控制PLC内程序走向,选择工作在“开环调压”或者“闭环调、稳压”两种工作方式。当工作在“闭环调、稳压”方式时,系统通过上位计算机设定所要求的直流高压电压值,由PLC处理采样信号,以1/4000的精度增减控制电压的数字量,达到稳定交流调压电路输出的目的。而构成交流调压电路的核心器件为3×150A的SCR智能调压模块。
在这个系统中,由PLC完成主要的实时控制任务,而上位计算机主要是为操作者提供一个具有虚拟仪器风格的软件操作界面,使操作者可以直观地了解到直流高压电源的运行状况,进行各项操作。
与这套计算机控制系统相对应,在课题进展过程中,还研制了一套手控的电路控制系统。假如计算机控制系统出现故障时,可以通过PLC输出的开关量去控制交流调压控制电路内的系统切换断电器来切换到手控系统。
2 PLC端软件设计
PLC编程所用的语言为梯形图。由于速调管走廊其空间电磁干扰非常强,常常会导致控制设备不能正常工作,所以这部分编程所要解决的关键问题是对采样数据的抗干扰预处理。
由实测波形可看到电磁干扰为重复频率50Hz的强脉冲电磁干扰,其脉冲展宽后波形如图所示。
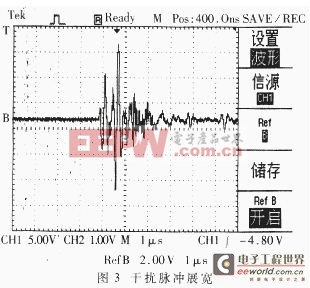
对于图中幅度较低的高频干扰成份,可以用多级π型RC滤波网络对其进行处理;对于电压幅值在正常信号取值范围之外,但是却被采集进来的信号干扰,可用梯形图编写限幅算法加以剔除。同时,对高于正常信号取值上限的采样信号加以剔除的结果是这时的控制信号将不再上升,SCR智能调压模块的输出也不再上升,相应地直流高压电源将不会跨过调制器正常工作的上限,调制器硬件设备也不会受到损坏。
对于采集到的在正常信号取值范围之内的干扰信号该如何剔除呢?为此设计了两种软件算法:异常数据剔除算法以及平均值算法。在做平均值处理时,采样点数不宜太多,3~5点比较合适,否则将对电压的纹波以及抖动不甚敏感,导致电压稳定度下降。
3 上位计算机端软件设计
上位计算机端的软件设计采用了National Instruments公司的LabWindow-CVI3.0.1编程平台。与Visual Basec Visual C++相比,Labwindow-CVI是专门用于EDA(Electronic Design Automatic)领域软件开发工作的平台。编程用C语言,采用面向对象(OOP,Object Oriented Programming)的编程方法。上位机端的软件控制面板按照所实现的功能被划分为4部分:系统
- 基于AT89C52的励磁调节器的设计与实现(07-23)
- PLC系统与电源系统的整合应用(07-26)
- 可编程控制器与电源的整合应用(08-09)
- 恒流高压直流电源的自动控制及应用(08-30)
- ITPM在雷达发射机高压电源中的应用(09-15)
- 如何选择合适的变电站用直流电源屏(09-20)