基于极点配置的400 Hz 逆变电源系统设计
0 引 言
当前400 Hz 电源广泛应用于要求电源体积小、重量轻的场合, 例如飞机、船舶、通信等领域。较之工频逆变电源系统, 400 Hz 电源系统的控制难度更大、可靠性要求更高。传统的逆变电源, 由于系统阻尼太弱,导致系统的动态特性和稳态特性不是很理想, 大量文献对这个问题做了深入研究, 多种控制方法也不断被提出来。极点配置方法以其算法简单、设计系统性能优良的特点较好地解决了这个问题, 并得到广泛应用。
文献[ 2] 提出了一种基于重复控制和带积分状态反馈控制的逆变电源控制策略, 并以极点配置方法进行系统设计; 文献[ 4] 针对已有逆变式切割电源的缺点, 利用基于极点配置的双闭环控制, 分析设计了移相全桥零电压开关变换器; 文献[ 5]、[ 6] 关于400 Hz 逆变电源的控制特点进行了系统的说明。本文采用极点配置与PI 控制相结合的方法, 设计了一款10 kVA , 200V/ 400 Hz 的逆变电源系统。
1 系统建模
由于功率开关管的存在, 显然逆变电源系统不是线性系统, 但针对一般的逆变电源, 开关频率要远大于基波频率, 而且在进行系统分析时假设功率开关器件的开关过程是理想的, 因此可将逆变电源以线性系统的形式来分析。该部分将以状态空间理论为基础对400 Hz 逆变电源系统进行建模分析。
图1 所示为电压型单相全桥逆变电源主电路图。

图中VT1 ~ VT 4是4 个IGBT ( 反并联二极管) , C 为滤波电容, L 为滤波电感, r 为综合串联电阻、死区效应、开关导通压降等因素的综合等效电阻, u1 为逆变桥输出电压, uo 为逆变电源输出电压( 电容电压) , io 是负载电流, i1 是电感电流。系统设计过程中, 把电感电流i1 , 电容电压uo 作为状态变量, 并把负载电流i o 作为扰动输入来处理。由状态空间理论可得其状态方程:

由自动控制原理可知, 系统在空载时的阻尼最弱、性能也不很理想, 故往往以空载的条件对逆变电源系统进行设计。如此可将式( 1) 所示的状态方程简化为如下形式:

k1i, k1p为电压外环的调节器参数; k2i, k2p为电流内环的调节器参数。
不难看出, 引入双环反馈以后系统变为四阶系统,特征方程D ( s) 的4 个根即为系统的四个极点。根据极点配置原理, 便可以根据希望得到的动态特性指标按如下过程进行极点配置:
主导极点对系统性能的影响作用最大, 主导极点距虚轴近, 因此可将主导极点设置为一组共轭极点:

非主导极点对系统特性的影响非常的小, 距虚轴的距离至少是主导极点的5 倍以上, 故为方便计算取两个非主导极点为: sr3 = sr4 = - n r r , 为使非主导极点对系统性能的影响尽量小, 非主导极点的实部绝对值应比主导极点实部绝对值大5 倍以上, 并且非主导极点对系统的影响随时间的推移衰减迅速, 一般n 取5 ~ 10 即可, 这里取n= 10。
由以上选取希望值可得到的闭环系统特征方程为:

2 仿真与分析
根据400 Hz 逆变电源的特性, 选择其开关频率为f sw = 20 kHz, 进而确定系统的阻尼振荡角频率为 r= 3 500 rad/ sec, 由于本系统相对应的逆变电源是在空载条件下设计的, 故为工作时加载留一定的裕量, 取 r= 0. 6, 系统的综合等效电阻r = 0. 1 。
滤波器的设计可有多种方法。本文采用一种较为简单的LC 滤波器设计法来确定LC 的参数。由于系统的开关频率远大于基波频率, 滤波器的截止频率一般选为1/ 10~ 1/ 15 倍的开关频率。本文选截止频率为f c= 1 600 Hz 即4 次谐波, 从而根据文献[ 7] 中采用的方法来确定滤波参数: L = 530 !H, C= 11. 9 !F。将以上确定参数代入式( 7) , 可计算出系统的反馈增益。经计算可得400 Hz 逆变电源的参数选取, 与50 Hz 系统相比不易确定, 本文取k1i= 231. 9, k1p = 0. 0776, k2i= 235909, k2p = 24. 4。将以上参数代入式( 5) 并进行MATLAB 仿真可得空载时系统特性如图2~ 图7。
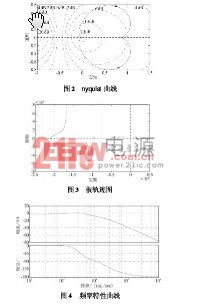
图2 为系统的奈奎斯特曲线, 可以看到, 曲线不包围( - 1, j0) 点, 根据奈奎斯特稳定判据可知系统是稳定的; 图3 为系统的根轨迹图, 可以看到, 一对共轭主导极点位于S 域左半面距虚轴较近处, 对系统特性起主要的影响作用, 非主导极点也位于s 域左半面, 对系统特性的作用较小, 从图中还可以看出, 4 个极点都位于S 域的左半面, 说明系统是稳定的; 图4 为系统的频率特性曲线, 由幅频特性与相频特性可知系统低频段特性平稳, 高频段幅值迅速衰减, 具有很宽的带宽, 在工作频率范围内具有很大的稳定裕度; 图5 为系统的单位阶跃响应, 由图可知系统具有较快的动态特性。

图6、图7 分别是空载时逆变电源系统输出波形和与之相对应的波
- 电源设计小贴士 1:为您的电源选择正确的工作频率(12-25)
- 用于电压或电流调节的新调节器架构(07-19)
- 超低静态电流电源管理IC延长便携应用工作时间(04-14)
- 电源设计小贴士 2:驾驭噪声电源(01-01)
- 负载点降压稳压器及其稳定性检查方法(07-19)
- 电源设计小贴士 3:阻尼输入滤波器(第一部分)(01-16)