基于滑模控制的三相双降压式并网逆变器
在可再生能源发电技术飞速发展的今天,并网逆变器作为可再生能源发电的关键设备,已经成为当前的研究热点。三相双压式并网逆变器作为一种新型拓扑,从根本上克服了传统的三相桥式并网逆变器存在的桥臂直通问题[1-2],工作时不用插入死区时间,可以很好地提高输出波形的质量。因此,三相双降压式并网逆变器具有重要的应用价值。但是在三相双降压式并网逆变器的控制研究中,目前常见的只有传统的PWM控制、滞环控制和单周控制。其中PWM控制的动态性能差且存在稳态误差[3];而滞环控制虽然具有很好的鲁棒性但其开关频率不固定,从而导致滤波器设计困难[4];单周控制虽然不存在稳态误差且抗输入扰动能力强,但其抗输出扰动能力薄弱[5]。
采用滑模控制则能很好地解决上述控制的问题,为此本文对三相双降压式并网逆变器的滑模控制进行了研究。首先对该拓扑进行了等效分析,然后依据等效分析电路重点对三相双降压式并网逆变器的滑模控制进行了设计,并在控制律中采用了平滑函数来取代符号函数以削弱抖振。
1 三相双降压式并网逆变器及其等效分析
三相双降压式并网逆变器由3个单相双降压式半桥并网逆变器组成,其拓扑结构如图1所示。

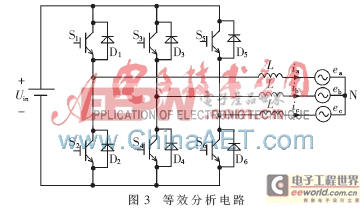
理想情况下,图1所示拓扑中电感均相等,假设都等于L,且可以忽略桥臂直通问题。因此,当三相双降压式并网逆变器运行在六段运行模式时,可以将三相双降压式并网逆变器的开关和二极管等效重组成如图3所示的等效分析电路。以区间Ⅰ为例进行分析,可以看出当三相双降压式并网逆变器和等效分析电路都按照表1运行在六段运行模式时,它们在该区间可以等效成同一个电路,如图4所示。同理在其他区间时三相双降压式并网逆变器与其等效分析电路都有一个对应的等效电路。


式中起削弱抖振作用的δd和δq通常取一个很小的正值。
设计好的滑模控制系统需要严格按等效分析电路对应的开关接入三相双降压式并网逆变器。由于等效分析成立的前提是三相双降压式并网逆变器与等效分析电路都运行在六段运行模式,故在接入对应控制信号时,必须经过六段运行模式控制器后接入,以保证其运行在六段运行模式。
3 仿真分析
为了验证上述理论分析的正确性与滑模控制下三相双降压式并网逆变器的工作性能,利用仿真软件搭建电路模型进行仿真验证。参数设置:直流输入电压Uin=1 250 V,所有电感都取1 mH,电网电压有效值为220 V,电网电压频率fs=50 Hz,并网电流参考信号与各相电网电压同频同相;高频单元采用滑模控制其调制器中三角波在仿真时可以取比较高的频率以保证准滑动模态;输入电压扰动从1 250 V跃变至1 600 V,电网扰动时取电网电压波动为15%。
从图5可以看出,在滑模控制下,三相双降压式并网逆变器输出的并网电流与电网电压同频同相,实现了单位功率因数向电网输出电能,经过FFT分析得并网电流的THD=1.61%,这表明并网逆变器输出的电流波形质量好,符合并网指标。图6表明三相双降压式并网逆变器工作在六段运行模式。图7表明输入电压扰动和电网电压扰动时,逆变器的输出并网电流几乎不变,这说明滑模控制下的三相双降压式并网逆变器对输入电压扰动和电网电压扰动具有很好的抑制能力,在各种常见扰动下依然能输出高质量的电能。


本文在对三相双降压式并网逆变器拓扑结构进行介绍的基础上,对其进行了等效分析,然后根据三相双降压式并网逆变器的等效分析电路,重点对其滑模控制进行了设计,并在控制律中采用了平滑函数来取代符号函数以削弱抖振。理论分析与仿真结果表明,采用滑模控制后的三相双降压式并网逆变器获得了很好的动态和稳态性能,其输出电流的总谐波畸变率小,能快速跟踪电网电压,实现以单位功率因数向电网输电,并且在各种常见扰动下基本不受影响,依然能保证向电网输送高质量的电能。
参考文献
[1] Yao Zhilei,Xiao Lan,Yan Yangguang.Dual-buck full bridge inverter with hysteresis current control[J].IEEE Transactions on Industrial Electronies,2009,56(8):3153-3160.
[2] 姚志垒,王赞,肖岚,等.一种新的逆变器并网控制策略的研究[J].中国电机工程学报,2006,26(18):61-64.
[3] 林渭勋.现代电力电子技术[M].北京:机械工业出版社,2006.
[4] Chen Baifeng,Gong Jinwu,Xiong Lan.Analysis and realization of a novel repetitive controller in active power filter system[C].Power Electronics and Drive Systems,2009:944-949.
[5] RUZBEHANI M,LUOWEI Z,MINGYU W.A new modification in structure of one-cycle controller[C].IEEE International Symposium on Industrial Electronics,China,2004,2(2):851-855.
[6] 刘金锟.滑模变结构控制MATLAB仿真[M].北京:清华大学出版社,2005.
[7] AMBROSINO G,CELENTANO G,GAROFALO F.Variable structure model reference adaptive control systems[J].Int J Control,1984,39(6):1339-1349.
- 离散滑模控制在UPS逆变器设计中的应用(03-07)
- 电源设计小贴士 1:为您的电源选择正确的工作频率(12-25)
- 用于电压或电流调节的新调节器架构(07-19)
- 超低静态电流电源管理IC延长便携应用工作时间(04-14)
- 电源设计小贴士 2:驾驭噪声电源(01-01)
- 负载点降压稳压器及其稳定性检查方法(07-19)