基于ARM11的电梯综合检测系统的研究

图为电流采集模块的电流互感器部分,使用时只需要将夹子打开,将待测量的线路夹在其中,即可引出电流信号,将引出的电流信号进行滤波放大后,进行AD转换后传送给下位机PIC16F616。
3 系统软件设计
3.1 上位机主控系统程序设计
3.1.1 平台构建
本系统采用的是Windows CE 6.0嵌入式操作系统,使用的开发工具是Embedded Visual C++,基于MFC的开发方式,在S3C6410这一硬件平台上进行开发。
3.1.2 驱动程序设计
对于Windows CE系统而言,驱动主要分为两种:本地设备驱动和流接口驱动。这两者之间最大的区别在于流接口驱动只提供一组通用的接口。
本地设备驱动,主要是常用设备的驱动,例如无线网卡驱动、LCD驱动、触摸屏驱动等,这些都是已经内置好了的,微软提供了专门的定制接口,使用的时候只需要通过这些接口就可以调用驱动程序了。系统启动时由GWES来加载实现启动这些本地设备驱动。
流接口驱动,它的主要功能是使得Windows CE系统和外围设备能够进行连接和通信。相对于本机驱动程序来说,所有的流驱动程序都使用同一个流接口函数集。本系统中的信号采集板模块的驱动程序就属于流接口的驱动程序。
下面是信号采集模块的流驱动设计,将信号采集模块命名为SCM(Signal collection module),首先要编写SCMDriver.cpp文件,该文件除了具备上述所需的接口外,还要添加AD转换部分,下面是AD转换的部分代码清单。
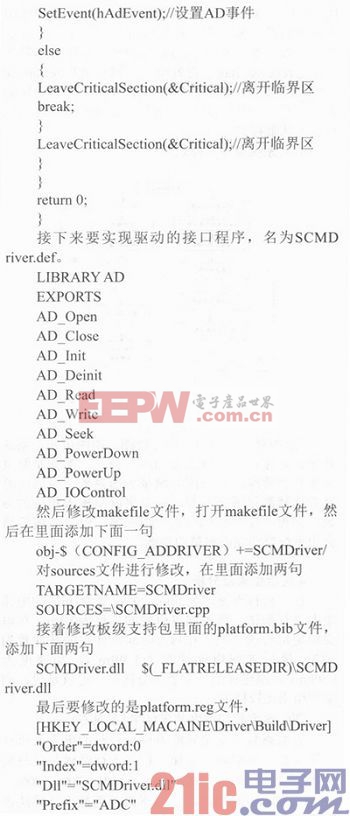
到此,驱动程序的所有工作都己完成,主控系统可以工作了。
3.2 下位机微控制系统程序设计
微控制系统的开发环境是Microchip MPLABIDE V8.0。系统上电进行初始化后,进入主程序中等待串口的中断。上位机发送命令后,串口中断子程序接收命令并存储在command中,主程序判断接收标志receive flag是否置位,然后解析command中的命令类型,进而执行相应的操作。等整个检测完成之后,上位机会发来一个结束命令,此时下位机进入休眠模式。
3.3 系统整体工作流程
图5为整个系统的工作流程图,由图可知,系统开机初始化以后,将会分为两部分,一部分是测量速度和加速度,另一部分测量平衡系数,可以由测量者选择测量哪个参数,接下来就是输入相应的参数,如曳引轮半径R、时间间隔t等,设定完成后将会由系统自动完成测量的功能。

在一台标准速度为2m/s,加速度为1m/s2的电梯里面进行测试,该电梯曳引轮的半径为0.3m,在电梯稳定运行的情况下在1s的时间内计得的脉冲数为1 27,最后求得电梯速度为1.99m/s,加速度为0.98m/s2,跟电梯的额定值十分接近,也就是说,测量的结果比较精确。
图6速度和加速度测量结果

平衡系数主要是靠测电梯运行时的电流来进行计算得到。分别测量电梯上行和下行时候负载分别0.10%、20%、30%、40%、50%、60%、70%、80%、90%、100%时的电流,记录下来并用最小二乘法进行数据拟合,两条曲线拟合的交点的横坐标即为所测电梯的平衡系数。
图7电流数据人工拟合图
图为不同情况下测量的电流值,根据这些值进行的人工拟合图,可见曲线不够圆滑,精度也不够高,效果比较差,测量的结果约为0.46。

根据上面的测量值,本系统拟合的曲线图,采用的是最小二乘法进行的二次拟合,可见曲线要圆滑精确得多,而且直接显示出了交点的坐标,减少了人工读数的误差,测量的结果为0.47,根据电梯管理条例的相关规定,电梯的平衡系数在0.4~0.5之间都算合格。
因此本系统很好地实现了几个不同检测量在同一台仪器上进行测量,并大大减少了测量的工作量,测量结果令人满意。
嵌入式系统 平衡系数 ARM11:电梯检测 相关文章:
- 嵌入式系统电源设计决巧,搞定电压转换!(12-07)
- 交互式应用一举两得 实时仿真与嵌入式系统并构(02-14)
- 小尺寸电源解决方案(11-20)
- 便携嵌入式系统电源的设计原则(07-08)
- 探讨嵌入式系统电源设计方案(08-28)
- 新型嵌入式系统电源监控模块设计(06-21)