便携式功率分析仪设计-----频率部分电路设计(一)
3.5频率部分电路设计
3.5.1常用测频方法微波信号的频率在微波通信、雷达、导航等微波工程中是表征微波信号特性的主要参量之一。
频率是表征周期现象的一种参数,定义为物体每秒振动的周期数,单位是赫兹(Hz)。微波电磁振荡也属于这个现象。从物理学知道,电磁振荡实质上是最简单的简谐振动。即使是非简谐振动,也可以看成是许多不同频率、相位的简谐振动之和。因此微波信号的一般表达式常写成

式中A为振幅,ω为角频率,f为频率,ψ为初相位。式(3-11)说明,表征微波信号的参数有振幅、频率和相位,就其常用者是前两个。关于振幅的测量即为功率测测量所以频率测量是功率分析中的重要组成部分。
频率测量方法目前普通采用电子计数器测量各种频率。使用电子计数器测量频率具有显示直观、操作方便以及精度较高的特点。在实际设计中主要分为硬件测频和软件测频两大类。
3.5.1.1硬件测频
常用的硬件频率测量方法主要是直接测频法和多周期同步测频法。最简单的测量频率的方法——直接测频法如图3-20所示,就是在给定的闸门信号中填入脉冲,通过必要的记数线路,得到填充的脉冲个数,从而算出待测信号的频率。

应用直接测频法,在测量过程中,根据信号的频率大小的不同,测量方法分为两种。当被测信号频率较高时,通常选用的频率较低的一个标准频率信号作为闸门信号,而将被测信号作为填补脉冲,在固定闸门的时间内对其记数,设闸门宽度为T,记数值为n,则这种测量方法的频率测量值为:f x = n/T测量误差主要是对被测信号记数产生的±1的误差,在忽略闸门信号自身误差的情况下,测量精度为:Δfx =±1/T当被测信号频率较低时,通常选用被测信号作为闸门信号,而将频率较高的标频信号作为填充脉冲,进行记数,设计数值为N,标频信号的频率为f 0,周期为T 0。则这种测量方法的频率测量值为:
fx= f0/N在直接测频的基础上发展的多周期同步测量方法,在目前的测频系统中得到越来越多的应用,多周期同步测频记数的闸门时间不是一个固定的值,而是被测信号的整周期倍,即与被测信号同步,因此消除了对被测信号记数产生的±1个的误差,测量精度大大提高,而且达到了在整个测量频段的等精度测量,多周期同步测频方法原理如图3-21所示。
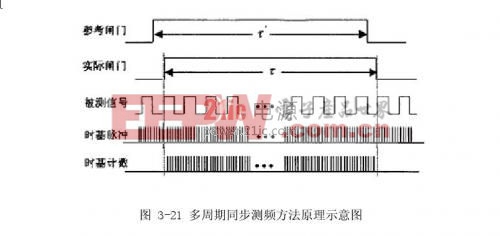
首先,给出闸门开启信号,此时,计数器并不开始记数,而是等到被测信号的上升沿到来时,才真正开始记数,然后,两组计数器分别对被测信号和时基脉冲记数,当闸门关闭时,计数器并不立即停止记数,而是等到被测信号上升沿到来的时候才真正结束记数,完成一次测量过程,可以看出,实际闸门与被设定的闸门并不严格相等,但最大差值不会超过被测信号一个周期,设对被测信号的记数值为Nx,对时基信号的记数值为N0,时基信号的频率为f0,闸门时间为τ,则被测信号的频率为:

3.5.1.2软件测频
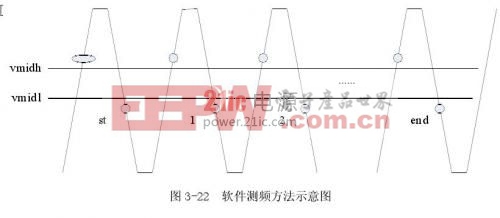
软件测频,所选择的触发窗口的宽度和波形幅度相关,在此我们定为波形幅度的10%,计算在某一段波形穿过触发窗口的个数,然后计算出波形的周期和频率,在图3-22中,令vmidh=VPP/2+5%*VPP, vmidl=VPP/2-5%*VPP,从数据区首地址开始找大于vmidh的点,找到点后,再找小于vmidl的点,把这一点的位置赋给start,找大于vmidh的点,再找小于vmidl的点,令per_num=1.依次类推,每次找到大于vmidh的点,再找到小于vmidl的点per_num++,这样在数据区找到的最后大于vmidh的点,再找到小于vmidl的点位置赋给end,那么per_num就是找到的周期个数,根据时基以及start和end的值,就可以计算出周期。
周期计算公式如下:

其中base代表时基,由于时基是固定的,所以点与点之间的时间是固定,所以可以通过起始点和结束点的位置(采样点的序号),确定数量的周期个数计算波形的周期。测出了被测信号的周期,然后将该时间的倒数作为频率来进行频率测量,使用公式:f =1/T其准确度取决于周期的测量精度。用此种方法计算周期数对于超过选择窗口的毛刺等尖峰会误认为一个周期,也不准确;对于类似

周期波形也无法准确判断其周期个数。波形时间类参数的计算,是和时基密切相关的。
所以根据以上分析,我们采用多周期同步测量方法。
3.5.2方案设计
频率计数器主要测量射频载波(CW)信号的频率,为整机提供频率测量数据。频率测量信道的主要设计思路是:预分频-整形-计数。射频信号通过前端功分器进入频率测量模块,由于功分器输出在-60~+20dBm范围内,我们通过集成数控增益射频微波放大器,以及限幅二极管调整信号满足后级预分频器输入信号电平要求。预分频部分
- 基于SIGLENT SDS2000的动态测量晶体管输出特性(12-09)
- 超低功耗倾角测量仪的设计(12-09)
- 微电流的测量方案(12-08)
- 简易的透射式能见度测量装置设计方案(12-08)
- 电源技巧:如何在隔离式电源中测量频率响应(12-05)
- 如何在隔离式电源中测量频率响应(12-05)