基于DSC的直流电机半桥驱动电路的设计
提供刹车回路。
在半桥驱动电路和直流电机之间,串接的电流传感器将流入电机的电流量转换为电压值,提供给DSC的ADCINA0端口进行监测。
考虑到MOS场效应管关断延时比开启延时要长很多,为了缩短关断时的不稳定过程,减少开关损耗,在Q1和Q2的栅极电阻R1和R3上分别并联一个反向的二极管D3和D4。同时,D4还可以避免在上端MOS管Q1快速导通时,下端MOS管Q3的栅极因耦合电压上升而导致短路现象。
在Q1和Q2都关断时,A点处于悬浮状态,其电位不确定。当Q1导通时,A点电位又会变为15V,而要驱动N沟道MOSFET管可靠导通,必须在栅极施加一个正电压,使VGD>10~15V。因此,施加在Q1的栅极驱动电压必须根据A点电位进行浮动。IR2183的浮动地引脚VS和芯片内部的高压发生器与外部的自举二极管和自举电容一起形成一个自举升压电路,可为Q1提供可靠的导通电压。本系统中D1和C2串联形成了一个自举电路。其中D1的电流额定值应大于等于MOS场效应管的门级电荷Qg与最高开关频率的乘积。若最高开关频率为100kHz,则对于IRF640来说,D1的额定电流值应大于5.8mA。同时为了减小自举电容C2储存的电荷损耗,应当选择高温反向漏电流小的超快恢复二极管。
由于电解电容存在有漏电流的问题,因此要尽量避免使用电解电容作为自举电容。同时最小自举电容的容值可根据公式1来计算:
 (公式1)
(公式1)其中:
Qg = 高端MOS场效应管的栅极电荷
f = 工作频率
ICbs(leak) = 自举电容漏电流
Iqbs(max) = 最大VBS静态电流
VCC = 逻辑电路部分的电源电压
Vf = 自举二极管的正向压降
VLS = 低端场效应管的导通压降
VMin = VB与VS之间的最小电压
Qls = 每个周期电平转换所需要的电荷(对于600V的半桥驱动器,该参数通常为5nC)
系统可靠性设计
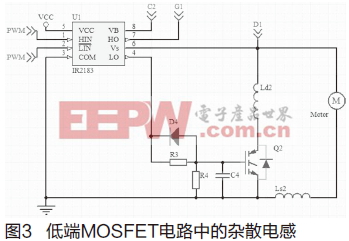
由于直流电机是感性负载,因此当Q1关断时,负载的电流不能突变,会转换到由Q2的续流二极管进行续流。由于在Q2的源极和漏极的电路引线上都存在有杂散电感Ls2和Ld2,如图3所示。加上续流二极管的导通延时,导致VS端的电压会负过冲到参考地(COM端)以下。IR2183可保证VS相对COM端有5V的负过冲能力。但如果超过5V,IR2183的高端输出(HO)将被锁定,而不响应输入信号的控制。轻者导致电路功能发生暂时性的错误,重则使LO和HO输出都为高,导致半桥短路而烧毁器件。
为避免这种情况的产生,在Q2的漏极和源极之间并联一个二极管D5,用来增加一个短路续流通路,降低VS端对地的负过冲,同时电阻R5也可以减小负过冲时,流入VS引脚的电流,由于该电阻处于自举电容的充电回路中,因此不宜过大,其阻值应小于5Ω。另外,适当选取自举电容的容值也可以有效避免VS的负过冲,通常建议自举电容的容值要大于0.47μF,并且电容的等效串联电阻(ESR)越小,也越有助于避免Vbs的负过冲。
同时,在芯片的COM引脚和Q2的漏极之间设计了一个限流电阻R6。当VS负过冲超过Vbs导致VB电平低于COM时,该电阻可抑制流入COM引脚的电流,防止因芯片内部COM端到VB端的寄生二极管导通,而造成HO的锁定。
软件设计
本系统软件采用C语言在TI公司提供的DSP集成编译器CCS3.3环境下编写。根据系统总体设计可知,系统软件需要根据所设定的转速,控制DSC输出相应的PWM信号,并实时监控电机的实际转速。根据检测到的转速,计算出实际转速与预设转速的误差。然后根据这个误差,采用增量PI算法,得出PWM控制信号的修正量,实时修正PWM信号的占空比,使直流电机的转速迅速达到设定的转速并保持稳定。与此同时,DSC还要通过ADCINA0通道,定时检测流入直流电机的电流值,当该电流超出电机的额定电流时,立即关闭PWM输出,停止向直流电机供电,防止因工作在过流状态而烧毁电机。软件流程如图4所示。

PWM信号采用TMS320F2810的事件管理器A(EVA)的通用定时器1产生。由事件管理器B(EVB)的通用定时计数器3对直流电机的正交编码信号进行计数,并由通用定时器4每隔30ms读取T3CNT的计数值。在通用定时器4的周期中断函数中,程序计算出电机的当前旋转速度,根据这个速度计算出当前电机的速度偏差e(k)。将该偏差和前一次速度偏差e(k-1)一起代入PI函数计算PWM调整增量ΔUcmp。该增量值加上当前的PWM占空比Ucmp后,写入比较寄存器T1CMPR中,调整PWM信号输出的占空比。在接下来的一个周期中,2810的T1PWM_T1CMP引脚将按照新的占空比输出PWM信号。采用事件管理器A的通用定时器2定时启动ADC模块进行模数转换,在ADC中断函数中,根据公式
DSC 半桥驱动 直流电机 PWM COM 201308 相关文章:
- 详细介绍如何采用DSC(DSP)控制交流逆变系统(11-30)
- 高速的DSC让控制系统游刃有余(06-24)
- Microchip连接电网的太阳能微逆变器220V参考设计(03-12)
- MicrochipdsPIC33F离线1000WUPS电源参考设计(03-11)
- 一种基于隔离式半桥驱动器的H电桥驱动电路(12-24)
- IRS27951:240WAC-DC电源解决方案(03-12)