基于逆变电源设计的两种双环瞬时反馈控制方式
电流型双环控制技术在DC/DC变换器中广泛应用,较单电压环控制可以获得更优良的动态和静态性能[3]。其基本思路是以外环电压调节器的输出作为内环电流给定,检测电感(或开关)电流与之比较,再由比较器的输出控制功率开关,使电感和功率开关的峰值电流直接跟随电压调节器的输出而变化。如此构成的电流、电压双闭环变换器系统瞬态性能好、稳态精度高,特别是具有内在的对功率开关电流的限流能力。逆变器(DC/AC变换器)由于交流输出,其控制较DC /DC变换器复杂得多,早期采用开关点预置的开环控制方式[1],近年来瞬时反馈控制方式被广泛研究,多种各具特色的实现方案被提出,其中三态DPM(离散脉冲调制)电流滞环跟踪控制方式性能优良,易于实现。本文将电流型PWM控制方式成功用于逆变器控制,介绍其工作原理,与电流滞环跟踪控制方式比较动态和静态性能,并给出仿真结果。
三态DPM电流滞环跟踪控制方式
电流滞环跟踪控制方式有多种实现形式,其中三态DPM电流滞环跟踪控制性能较好且易于实现。参照图1,它的基本工作原理是:检测滤波电感电流iL,产生电流反馈信号if。if与给定电流ig相比较,根据两个电流瞬时值之差来决定单相逆变桥的4个开关在下一个开关周期中的导通情况:ig-if>h时(h见图1,为电流滞环宽度,可按参考文献[1]P64式5?2选取)S1、S4导通,UAB=+E,+1状态;ig-if-h时S2、S3导通,UAB="-"E,-1状态;|ig-if|h时S1、S3或S2、S4导通,UAB="0,"0状态。两个D触发器使S1~S4的开关状态变化只能发生在周期性脉冲信号CLK(频率2f)的上升沿,也就是说开关点在时间轴上是离散的,且最高开关频率为f。
仿真和实验表明,iL正半周,逆变器基本上在+1和0状态间切换,而iL负半周,逆变器基本上在-1和0状态间切换,只有U0过零点附近才有少量的+1和-1之间的状态跳变,从而使输出脉动减小。
电流型准PWM控制方式
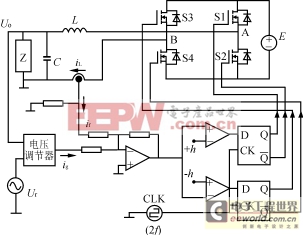
图1三态DPM电流滞环跟踪控制方式
综合常规PWM单、双极性工作方式的优缺点,并借鉴滞环控制技术,得到改进的电流环控制电路如图2。S3、S4基本上以低频互补,S1、S2以高频互补方式工作。其基本工作原理:
(1)ig正半周,即ig>0时
比较器CMP1输出高电平,S3一直关断。
时钟信号CLK的上升沿将触发器RS1置1,S1、S4导通,S2关断,UAB为+E,iL按式(1)上升
M1=diL/dt=(E-U0)/L(1)
当iL升至if>ig时RS1翻转,S1关断、S2导通,UAB为0,iL按式(2)变化
M2=diL/dt=-U0/L(2)
若U0>0,则iL下降,至开关周期结束;而若U00,则iL继续上升,此时可能出现三种情况:
①if上升率小于ig,则if相对于ig下降至开关周期结束;
②if上升率略大于ig,开关周期结束时if大于ig而小于ig+h,则下一个开关周期仍保持该状态(UAB为0);
③若if升至ig+h,则CMP3翻转为1、将RS3清零,S4关断,负载通过D2、D3续流,UAB为-E,iL按式(3)下降至开关周期结束。if的峰值不大于ig+h
M2=diL/dt=-(E+U0)/L(3)
(2)ig负半周,即ig 比较器CMP1输出低电平,S4一直关断。
时钟信号CLK的上升沿将触发器RS2清0,S2、S3导通,S1关断,UAB为-E,iL按式(3)下降。
当iL降至if时RS2翻转,S2关断、S1导通,UAB为0,iL按式(2)变化:若U0,则iL上升至开关周期结束;而若U0>0,则iL继续下降,此时也可能出现三种情况:
①if下降率小于ig,则if相对于ig上升至开关周期结束;
②if下降率略大于ig,开关周期结束时if小于ig而大于ig-h,则下一个开关周期仍保持该状态(UAB为0);
③若if降至ig-h,则CMP4翻转为1,RS3清零,S3关断,负载通过D1、D4续流,UAB为+E,iL按式(1)上升至开关周期结束。|if|的峰值不大于|ig-h|,即|ig|+h。
可见,这也是一种三态工作方式:iL与U0同相时,逆变器工作在PWM方式,在1状态和0状态(或-1状态和0状态)间转换;二者反相时,滞环才起作用,它使逆变器在1,0和-1三种状态间转换。
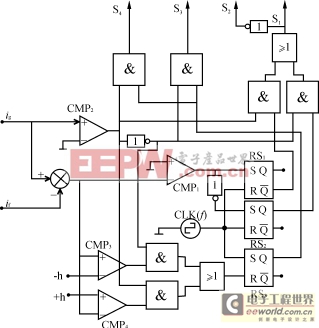
图2电流型准PWM静态性能的比较
以某逆变器为例,分析和比较上述两种控制方式下的动态和静态性能。电路参数:E=180VDC,L=1mH,C=20μF;调制频率为f;输出:U0=115VAC、fo=400Hz;额定负载:1kVA电流和电压反馈系数分别为0.4167和0.25;电压调节器为PI型:放大倍数 Ap=13?5,时间常数τ1=0.27ms;
表1为不同负载和不同调制频率下U0与基准电压Ur的静态误差和U0的THD。
表1不同控制方式下的稳态性能的比较

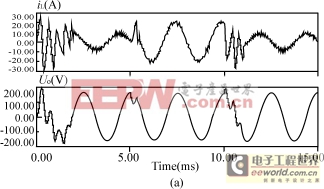
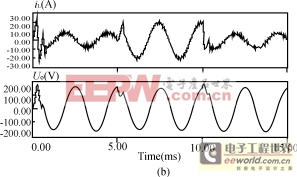
图3起动及突加突降负载动态响应过程
(a)三态DPM电流滞环跟踪控制方式
(b)电流型准PWM控制方式
![]()
静差定义为:,式中U01是U0基波份量有效值,Uon为输出电压额定值。
分析表1及仿真波形(略),发现:
(1)调制频率f较低时,电流型准PWM波形失真较严重,但其T
- 中小功率光伏用逆变电源现状发展分析(12-09)
- 一款基于UC2525的交流逆变电源设计(12-08)
- 弧焊逆变电源的谐波分析和抑制(12-08)
- 逆变电源及逆变电源的原理(12-08)
- 逆变电源的SPWM波形发生电路(12-08)
- 关于纯逆变电源逆变器的介绍(12-08)