dz���첽��Ӧ�������ϵͳ�е�������Ƶ�ĵ��ټ���
������
3.1 ����SPWM����
����������SPWM���Ƽ���ʱ������Ҫ��֤���������еĵ�����λ��Ϊ90�㣬���ԣ���·�����źŵ���λ��Ӧ��ҲҪ�趨Ϊ���90�㡣SPWM���Ƶ��ŵ���г�������ͣ��˲�����Ƽ�����ʵ�ֵ�ѹ����Ƶ���ܡ����ǣ�SPWM��ȱ��Ҳ�����ԣ���ֱ����ѹ�����ʵͣ��ʺ�ģ���·�����������ֻ�������ʵ�֡�
3.2 ����SVPWM����[6]
���ݵ��ѧ��֪ʶ��֪����ѹ�ռ�ʸ��![]()
ͬ��϶�ų�![]()
֮��������¹�ϵ��
 (4)
(4)
ͨ�����Ƶ�ѹ�ռ�ʸ�������Ƶ����϶�ų�����ת������SVPWM�����ֳ�Ϊ�����켣���ơ�
��������S1��S2��S3��S4�Ŀ�������������4ֻ��������ֻ�ܲ���4����ѹʸ�������ݲο�����[6]����ͼ�����ɵõ�ͼ4��ʾ�ĵ�ѹʸ��ͼ��

ͼ4 ��ѹʸ������
��ʸ��ͼ�������������������·�У�����������ѹʸ����Ϊ�˺ϳ�һ����ֵΪU�������Ϊ���ĵ�ѹʸ������ʸ���ֽ�ʱ����X��ķ���Ҫ��E1��E2��ͬ��ɣ���Y�����Ҫ��E3��E4��ͬ��ɡ���һ����������T�ڣ�E1���õ�ʱ��Ϊt1����E2���õ�ʱ��ΪT-t1��E3���õ�ʱ��Ϊt2����E4���õ�ʱ��ΪT-t2������ʸ���ֽ���Եõ�ʽ(5)��ʽ(6)(ʸ��E1��E2��E3��E4�Ĵ�С��ΪUd/2)
t1=

T(5)
t2=

T(6)
����t1(t2)(=)T
![]()
�����Ԫ�Ud/2������������·�ڲ���SVPWM����ʱ��������ѹ�����ֵΪUd/2��
3.3 �������ű�ȫ�����SPWM����[7]
����SPWM����ʱ����N1��N2���ɵĹ����ű�Ҫͬʱ�����������������У������ڵ���ʱ�������ű۵ĵ��Ʋ��Ͳ�ͬ��A��B�ű۵ĵ��Ʋ���
��������·������Ʒ���Ϊ�����ز���ͬ������£�A��B����Ʋ�Ϊ���Ҳ�����λ��A�೬ǰB��90��(�����ת����֮��B�೬ǰA��90�㣬������ת);�����ű�����ú㶨ռ�ձȵķ������ƣ������ű�ռ�ձȾ�Ϊ50%����ͼ5��ʾ��
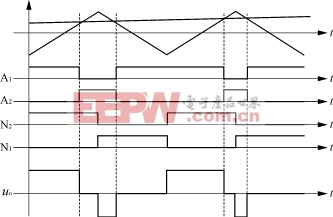
 �����A��B�����ϵõ���ֵ��ȣ���λ���90������ҵ�ѹ����ѹ��ֵ����ƶ�m�����ȡ���m=1ʱ�������ѹ��ֵ�ﵽ���ΪUd/2�����ݵ����V/f���ߺ������ѹ��m�Ĺ�ϵ������ʵ���������ı�ѹ��Ƶ���ٿ��ơ�
�����A��B�����ϵõ���ֵ��ȣ���λ���90������ҵ�ѹ����ѹ��ֵ����ƶ�m�����ȡ���m=1ʱ�������ѹ��ֵ�ﵽ���ΪUd/2�����ݵ����V/f���ߺ������ѹ��m�Ĺ�ϵ������ʵ���������ı�ѹ��Ƶ���ٿ��ơ�
3.4 �������ű�ȫ�����SVPWM����[5]
����·�У�����������ÿһ��ͨ��ģʽ�������ڵ��������һ֧�ռ��ѹʸ���������������ű�����·������ͬһ�ű����¿��ػ�����ͨ��ԭ�������ű۹�����8�ֿ������ģʽ�������ڵ�������ϵõ�8֧�ռ��ѹʸ����������V(A��N��B)����ʾ������A=1ʱ����ʾA1��ͨ��A2�ض�;A=0ʱ����ʾA1�ضϣ�A2��ͨ���������ơ�8֧ʸ�����1���С�

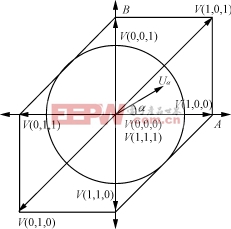
ͼ6 �������ű۵�ѹ�ռ�ʸ������
4 ����
1)�������������·�Ľṹ��Ҫ��Ϊȫ�źͰ������֡����ŵ�·�ṹ���ɱ�������Ҫ��ǰ����Դ���ȶ��ṩ�����Գ������
2)ȫ������·�������������ű���Ҫ�Ŀ���������Խ��٣����ڲ��������·������Ԫ����ģ�飬����8ֻ����������ɵ�ȫ������·�������ԡ�
3)���ŵ�·����SPWM��SVPWM����ʱ�������ѹ���ֵ��ͬ;��ȫ�ŵ�·�У�SVPWM��ֱ����ѹ�����ʱ�SPWMҪ�߳�41%��SVPWM�����������ֻ���ʵ�֣���������ʸ������˳������Ч��С������ġ�
4)�����Ͽ��Ʒ����������ձ���ڵ�����Ϊֱ����ѹ�����ʽϵ͡����������ѹ�������ǵ�������Ƶ����Ҫ�˷�������֮һ������������ת�ų��д�����3�μ�5�εȵ�Ƶг�������ԣ���ѡ�ÿ��Ʒ���ʱҪע���Ƶг�����������������������鴹ֱ�ֲ����˴�֮��Ļ��нӽ����㣬�ڲ��ø����ӵĿ��Ʋ��ԣ���ת��ֱ�ӿ���ʱ�������ӳ̶ȵ�����;ͬʱ�����������������������֮����ȷ���ų���λ�ã�Ϊ�����϶�ų��ļ���ṩ��һ����Ч��;����
- ��ҵ������ֱ��������������ϵͳ������(12-16)
- ��Ƶ���ͱ�Ƶ��Դ�Ĺ���ԭ�����������(12-09)
- ����DDS�ı�Ƶ���������͵�Դϵͳ���(12-09)
- ����������Ƶ��Դ����֪ʶ��ѡ��ο�(12-08)
- ��Ƶ��Ӧ��ʱ��12������(12-08)
- dz����Ƶ��Դ���Ƶ��������(12-08)