三相四桥臂逆变器的PWM控制策略
与其他三相逆变器相比,三相四桥臂全桥逆变器具有体积小、重量轻、成本低的优点,因此具有很好的应用价值。该逆变器控制策略主要有空间矢量控制法和滞环控制法,其中对空间矢量控制法的研究较为深入。三维空间矢量控制法虽然具有电压利用率高、控制灵活、效率高等优点,但其空间矢量图抽象,难以理解,控制时需进行坐标变换,且开关矢量带有根号,控制较为复杂。滞环控制法的控制思想简单,易于理解,但该方法用于四桥臂逆变器时,需对各相误差电流大小进行判断,从而决定第四桥臂两开关管的开关状态。因此,控制的实时性和精度受到了影响。
此处研究了一种零序电流注入的PWM控制策略,该控制策略能实现三相四桥臂逆变器的解耦控制,且控制方法简单,易于理解和实现。与常规的正弦波调制方法相比,直流母线电压利用率得到了提高,且具有很好的带不平衡负载能力。
2 三相四桥臂逆变器系统模型
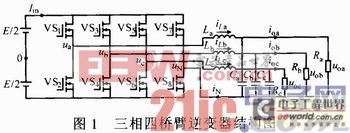
图1示出三相四桥臂逆变器主电路结构图。为便于分析,假设直流电源E分为两部分,中间点电位为零。4个桥臂的中间点电压分别为ua,ub,uc,uN,电感电流分别为iLa,iLb,iLc,三相输出电压分别为uoa,uob,uoc,输出电流分别为ioa,iob,ioc。
三相四桥臂逆变器的状态方程为:

三相四桥臂逆变器有8个开关管器件,用Sa,Sb,Sc,SN分别表示每个桥臂的开关函数。当桥臂上管开通,下管关断时,定义此桥臂的开关方式为Si=1(i=a,b,c,N);当桥臂上管关断,下管开通时,定义Si=0。
令SaN=Sa-SN,SbN=Sb-SN,ScN=Sc-SN,则桥臂输出电压与直流侧输入电压之间的关系为:

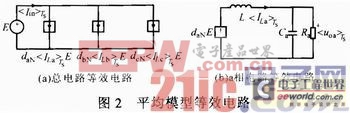
由上式可得三相四桥臂逆变器开关周期平均模型等效电路如图2所示。可见,该电路每一相都是独立的,相互之间不存在耦合关系,若采用的控制方法合适,可将三相四桥臂逆变器分解成3个独立的单相全桥逆变器,各逆变器输出电压相位互差120°。
 3 零序电流注入控制策略
3 零序电流注入控制策略
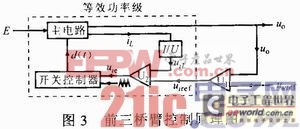
前三桥臂采用瞬时电压电流双闭环控制策略,电压电流环均采用PI控制器,由于a,b,c相控制方法相同,以其中任意一相为例进行说明,其控制原理图如图3所示。图中,I/U为电流采样器,将iL转换成电压信号uiL;U1为电压控制器,将输出采样电压uo与参考电压uuref相比较产生电压误差信号uiref,作为电流环的基准信号;U2为电流控制器,将uiL与uiref相比较得到电流误差信号uie,并作用于开关控制器,从而将模拟量转换为脉冲量d(t)作用于主功率开关变换器。电流环是内环,实现电流的自动调节,确定系统对输入电压的响应;电压环是外环,实现电压的自动调节,确定系统对负载电流的响应。
第四桥臂采用瞬时电流控制法进行控制,该方法将a.b,c三相的电流给定信号,即uiref进行三相正负半波整流,得到整流后的电流信号包络线作为第四桥臂电流给定信号,将该电流给定信号与三角波交截产生第四桥臂的控制信号,去控制第四桥臂两个开关管的导通和关断。
采用上述控制方法可实现三相电压电流解耦的原因是:根据不对称分量法,三相逆变器的三相电流可分解为正序、负序和零序分量。如果需要保证在不平衡负载条件下,三相输出电压对称,那么必须保证各相相电流中只存在正序和负序电流而不存在零序电流,即只要利用三相四桥臂逆变器的第四桥臂为三相逆变器的零序电流提供通路,就能实现三相输出电压平衡,也能实现三相电压电流的解耦控制。接下来讨论如何得到三相电流中的零序电流:所有3k次谐波(k为自然数)均为零序电流,而三相电流经过三相正负半波整流后得到的电流包络线,也正好含有3k次谐波,可见三相电流经正负半波整流后得到的包络线实际上就是三相电流中的零序电流。4 控制策略对直流电压利用率的 影响
将第四桥臂的电流给定信号取出,分别加到a,b,c三相电压环的输出端。由于第四桥臂电流为零序电流,其含量最多的是3次谐波,因此也可以理解为在a,b,c三相的调制信号中加入了3次谐波。采用3次谐波注入的正弦波调制时,正弦基波的幅值被削低。同样在调制度为1的情况下,调制波中含有更大的基波幅值,根据控制原理,输出信号是跟随给定信号的,既然给定信号中调制波基波幅值增大,那么逆变器输出端产生的基波幅值也随之增大,从而提高了逆变器的直流母线电压利用率。3次谐波注入的正弦波调制与常规的正弦波调制相比,直流电压利用率提高了13.4%。
5 实验
研制了一台采用零序电流注入法控制的三相四桥臂逆变器原理样机,设计参数为:E=290 V,交流输出电压115 V,输出电压频率400 Hz,La=Lb=Lc=240μH,Ca=Cb=Cc=14μF,额定负载6 kVA,每相2 kVA。实验波形如图4所示。
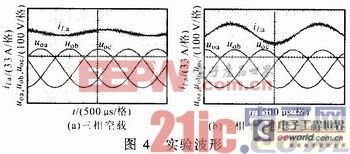
图4分别
- 实现智能太阳能管理的微型逆变器应运而生(05-06)
- 只需少量器件的廉价自动复位断路器(07-31)
- 即将普及的碳化硅器件(10-19)
- IR2110驱动电路的优化设计(03-15)
- 关键电源及LED照明应用的最新高能效规范要求、设计挑战及解决方案(12-07)
- 基于FPGA的三相PWM发生器(06-23)