基于磁流变液阻尼器运行状态敏感电流源设计
尼器的运动状态后,选择将其与3或者1脚接通,3脚和1脚的控制电压由可调电位器R2、R11控制,表示需要控制输出电流大小的信号,然后通过电压跟随器输入TL494,该信号与反馈信号比较后,控制TL494的输出脉冲宽度,当在一个周期的高电平期间,信号经过Q2驱动后,使MOSFET导通,电源电压加在减振器线圈上;当在一个周期的低电平期间,MOSFET截止,磁流变减振器线圈内部储存的能量通过二极管D1续流;在一个周期中通过改变高低电平的时间比,使作用于线圈的平均电压发生变化,从而改变其导通电流;电流值又通过R16采样,然后放大、滤波后又输入TL494,与控制信号进行比较,使反馈值及时跟踪控制信号电压值的变化,形成闭环控制回路,自动调节脉宽,保证输出电流的稳定。 图中R7、R8、C2是相位补偿,C1、R9决定TL494的内部振荡频率,R12,R15决定其死区时间,Q3的作用是为MOSFET的极间电荷提供泄放回路。
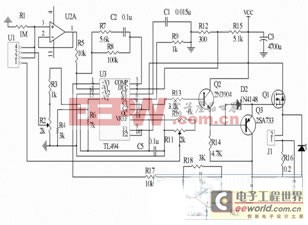
图4 电流驱动器原理图
2.3 软件设计
图5是完成一次测控的流程图:
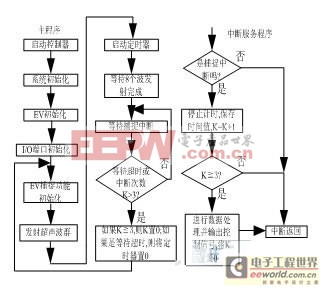
图5 超声波检测运行状态流程图3、实验测试结果
3.1 测量的分辨力
在温度T=24.875°C时,测试各距离对应的计时脉冲数据见表1:

表 1
从表中数据可以看出,实际距离每1毫米的变化,计数脉冲有约30个的变化,每个记数脉冲为0.1μs。
3.2 系统响应的实时性
系统每测控一个循环的耗时主要由两部分构成,即超声波对阻尼器的运行状态辩识的时间和电流驱动器接收到控制信号至输出电流稳定的时间,前者由于采用了测量三次通过一定处理后,作为最终的计数脉冲值,每次测量最大耗时约2.5ms,共7.5ms;图6是电流驱动器在阶跃上升和下降信号作用下的实测动态响应图,图中上面是阶跃输入信号曲线,纵向每格的幅值为2.00V;下面是在取样电阻两端实测的响应曲线,纵向每格的幅值为1.00V;横向为时间轴,每格的宽度为2.00ms;可以看出,在阶跃信号激励下,实际的上升时间和下降时间都低于2.5ms,因此系统总的动态响应时间约10ms,完全满足实时性要求。
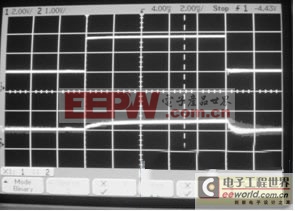
图6 电流驱动器的动态响应图
3.3 系统的稳定性
系统的稳定主要由取决于超速波传感和电流驱动器部分,前者由于环境因素的影响可能产生误触发,因此在一个测控循环中,通过对连续三次测量数据结合阻尼器的安装位置和可能运行的最大速度等进行数据有效性分析,从而确定本次循环的准确时间,表2是在同一距离处,静态测量9次的测试结果:

表 2
由于阻尼器的电感约2.45mH,静态电阻约1.2Ω,电流驱动器采用BUCK变换拓扑电路结构时,后面不接平波电感和滤波电容输出的电流纹波已经很小,因此开关管后面的线性部分是典型的一阶惯性环节,通过PI调节后,其单位阶跃响应没有稳态误差,不存在超调量和峰值时间,只要反馈系数取得合适系统都是稳定的。
4、结论
本文采用超声波传感器结合数字信号处理器对磁流变液阻尼器运行状态进行感知,利用脉宽调制(PWM)原理结合磁流变液阻尼器的阻抗特性,设计了其电流源驱动器;软、硬件设计简单、方便,又能满足了系统的实时性和分辨率要求,对类似非接触式动态位移测量系统也有一定的参考价值。
- 电源设计小贴士 1:为您的电源选择正确的工作频率(12-25)
- 用于电压或电流调节的新调节器架构(07-19)
- 超低静态电流电源管理IC延长便携应用工作时间(04-14)
- 电源设计小贴士 2:驾驭噪声电源(01-01)
- 负载点降压稳压器及其稳定性检查方法(07-19)
- 电源设计小贴士 3:阻尼输入滤波器(第一部分)(01-16)