以提高自身响应速度为目的磁控电抗器快速性研究
磁控电抗器(MCR)作为一种SVC装置,主要应用在补偿系统无功、抑制电压波动和闪变等方面,因此快速性是其至关重要的一个特性。以提高可控电抗器在接入电网时自身响应速度为目的,根据其工作原理,对其快速性展开了深入探讨和研究,在快速励磁基础上,提出了
快速去磁方法,通过EMTDC/PSCAD软件进行了仿真,并进行了实验验证。结果表明其快速性得到了很好改善。
1 引言
可控并联电抗器可简化系统无功电压控制,抑制工频过电压和操作过电压,动态补偿线路充电功率,抑制潜供电流等,能满足系统多方面需求,因此具有广阔的应用前景。作为可控并联电抗器,MCR具有适用电压范围宽、可靠性高、谐波小等显著优点,是一种经济、高性能的静止型无功补偿装置。但MCR的部分特性(如谐波特性、快速性)需要进行改善,以便更好地应用于电力系统。这里针对MCR的快速性展开了相应探讨和研究,并提出一种可快速励磁及去磁的电路方案。
2 MCR的工作原理及快速性
2.1 MCR的工作原理
MCR主铁心分裂为两半,即铁心1和铁心2,截面积为A,每一半铁心截面积具有减小的一段,4个匝数为N/2的线圈分别对称绕在两个半铁心柱上,半铁心柱上的线圈总匝数为N,每一半铁心柱的上下两绕组各有一抽头比为δ=N2/N的抽头,它们之间接有晶闸管KP1(KP2)。不同铁心上的上下两个绕组交叉连接后,并联至电网电源,续流二极管则横跨在交叉端点上,对大容量的MCR而言,δ取值通常很小,因此KP1(KP2)的工作电压远小于其额定电压。图1为MCR结构电路。
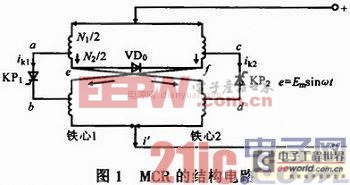
在整个容量调节范围内,只有小面积段的磁路饱和,其余段均处于未饱和的线性状态,通过改变小截面段磁路的饱和程度来改变电抗器容量。在电源的一个工频周期内,KP1,KP2轮流导通,起到了全波整流的作用,二极管起续流作用。改变KP1,KP2的触发角便可改变控制电流的大小,从而改变电抗器铁心饱和度,以平滑连续地调节电抗器容量。2.2 磁控电抗器的快速性
MCR的响应时间决定于:n=(1-δ)/(2δ),n为MCR容量从空载到额定值所需的工频周期数。
可见,n与MCR的抽头比6成反比。对大容量MCR而言,δ取值通常很小,并且在实际应用中考虑到MCR的有功损耗,其响应时间约在0.19~0.66s。但当MCR应用在抑制电压闪变、自动调谐消弧线圈、动态无功补偿等方面时,此响应时间显然不满足工况要求,因此需要有更快的响应速度,在一个工频周期内达到额定工作状态,即快速励磁,并且需要它从额定状态到空载的响应速度也在一个工频周期内,即快速去磁。3 快速励磁及去磁工作原理
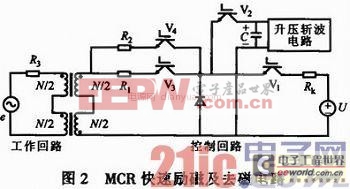
基于上述分析,提出MCR快速励磁及去磁的等效电路,如图2所示。电路由升压斩波电路(主要用于给电容储能)、电容C和V2构成的快速励磁电路、由去磁电阻R2和V4构成的快速去磁电路,及MCR本体的工作回路和控制回路组成。
该电路具体工作原理为:
状态1 根据MCR具体的应用电压等级场合,来选择升压斩波电路中的电压源值,并调节其内部IGBT的导通占空比,使C上电压值满足在控制电源电压值最大时,其放电时间不少于一个工频周期(20 ms)。待电容电压值稳定后,此时C上的储能为:,U0为电容上电压值。此状态内V1,V2和V4处于断开状态,V3闭合。
状态2 当电力系统发生电压波动,需要MCR工作来补偿无功时,V2导通,C向控制绕组(电感L)放电,要让L中的电流在极短时间内从零变为一定值,由WL=LI2/2可知,需快速给控制绕组储能。这就需要电容和电感间迅速的能量传递。其又为一个二阶等效电路,具体数学模型为:
 式中:RL为控制 绕组电阻值。
式中:RL为控制 绕组电阻值。
U的值在系统发生电压波动瞬间,由KP1(KP2)的导通角便可得出。
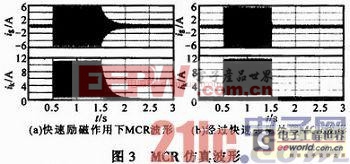
状态3 V1在V2关断5 ms后导通,投入工作电压,延时5 ms是防止两个不同的电压并联。此时电流仿真波形如图3a所示。由图可见,MCR经过快速励磁后,其工作电流在一个工频周期内即到达了额定状态。但也可明显看到当MCR退出系统后,仍有较长去磁时间,这对系统的稳定相当不利。因此电路中必须有快速去磁环节。
此处控制电路的另一大优点是,在进行完一次无功补偿后,当检测到C值减小时,升压斩波电路与C连通,给C充电,使C上电压值恒为初始值,为下一次补偿作准备。从而可以连续、无限次地作用于系统。
4 实验结果
此处装置控制器由DSP,FPGA和CPLD等构成,其中
- 磁控溅射法沉积TCO薄膜的电源技术(09-17)
- 电压型PWM整流器电感下限值设计与分析(05-13)
- 电抗器主要特点(04-10)
- 电抗器相关应用(04-10)
- 电抗器作用及分类(04-10)
- 变频器要加入电抗器及电抗器分类和功能(03-11)