MM74HC4046在感应加热电源中用法的改进
R3 、R4和C2 。
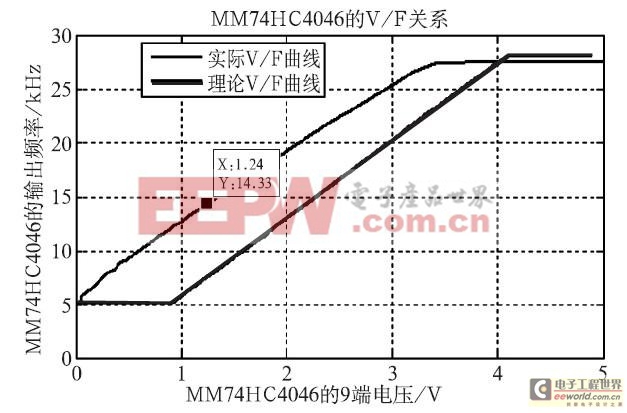
图4 9 脚电压与4 脚输出频率关系曲线
利用图1 中的霍尔传感器检测出负载的电流信号,并定义由A 至B 为正方向,电流信号经过滤波和过零比较处理后,得到与霍尔电流信号同频同相的方波信号,加载到MM74HC4046 的14 脚,4 脚的输出信号经过时间补偿后加载到3 脚,3 脚信号与14 脚信号进行相位比较,产生的相位差与9 脚的平均电压呈线性变化。同时4 脚的输出信号经过桥臂互锁与隔离驱动后分别加载到VT1 ~VT4 ,并保证VT1和VT4的驱动信号的方向与定义的正方向一致。
2.2 它激到自激转换的实现
在MM74HC4046 上电瞬间,无霍尔电流信号,压控振荡器以最低频率输出,若反馈霍尔电流信号大于一定的电压值,锁相环则进入自激状态。但在实际应用中,受到各种环境和条件的影响,锁相环可能在运行过程中出现失锁,此时9 脚的电压为MM74HC4046的供电电压,且压控振荡器输出最高频率;13 脚输出不再是稳定的三态输出;1 脚输出为表示14 脚与3 脚相位差的脉冲信号,该脉冲信号的占空比与绝对相位差呈线性关系。由于传统它激启动和它激到自激的转换方法的不足,使得感应加热电源的稳定性和可靠性不能得到有效的保证。
为弥补传统方法的不足,本文利用MM74HC4046自身的特点,首先,对1 脚的输出信号进行滤波整形后,微处理器对其进行AD采样,当其值低于某一设定的值时,可以断定锁相环处在失锁状态;随后,微处理器对光耦P1进行控制,通过虚框内的两个二极管VD1和VD2管压降的箝位,电阻R5的限流,将其9 脚电压拉至起振电压,使锁相环进入它激状态;最后,将光耦P1的状态恢复,锁相环则进入自激状态,实现电源运行中的锁相环它激到自激的转换,完成失锁控制,保证负载电压与负载电流的无相差跟踪。
3 实验结果
根据实际要求,选用40 A、600 V的IGBT 作为逆变器件。设计锁相环的压控振荡器输出的最低频率为5 kHz ,最高频率为28 kHz 。负载L 为108 μH,C 为0。44 μF ,其谐振频率在20kHz 附近。图5 为锁相环处于无相差跟踪状态的波形,其中信号U1为MM74HC4046 的1 脚输出,可以看出U1基本保持高电平,说明14 脚与3 脚基本无相位差;信号U13为13 脚的电压波形,可以看出其一直保持为3。49 V,说明此脚一直处于高阻态,锁相环处于稳定无相差跟踪状态;信号io表示为霍尔电流信号,可以看出电流波形非常近似为正弦波;信号uo表示加载到VT1和VT4的前端驱动信号,通过与io的相位对比,可以看出此时逆变器工作于准谐振状态,逆变输出频率为21。95 kHz 。图6 为在未加缓冲电路情况下,直流电压Uo 、负载电压iAB和负载电流io的波形,Uo的平均电压为104 V,UAB的最大峰-峰值为380 V,可以看出逆变器件在换流时di/dt 较小,对逆变器件造成的电磁应力与电压冲击也较小。
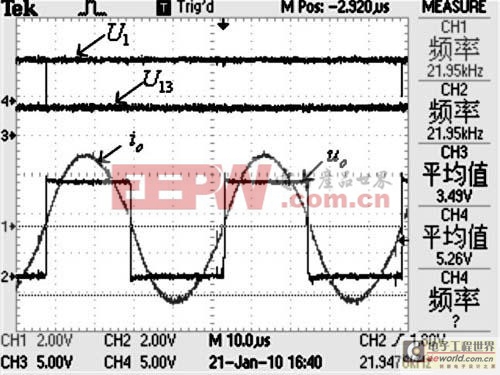
图5 锁相环无相差跟踪状态各信号波形
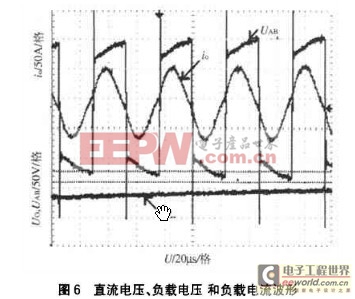
图6 直流电压、负载电压和负载电流波形
4 结 论
实验结果表明,本文对MM74HC4046 集成锁相环的传统用法进行了改进,在保证实现传统逆变器的零电流谐振软开关,减轻逆变器件的电磁应力和开关损耗的前提下,实现了数字化控制的它激 到自激的转换,使得感应加热电源的运行状态可以实时检测,并可以进行失锁控制,相对于传统的设计方法更加适应于实际应用,提高了电源的可靠性与稳定性。根据上述分析得出以下结论:
(1)根据锁相环MM74HC4046 改进后的数字化控制用法设计的感应加热电源是合理的,可行的。
(2)研制的4.4 kW/20 kHz 感应加热电源,应用于现场注塑机加热,经半年的使用,性能稳定可靠。
(3)在研制更高频率和更大功率的感应加热电源领域,该设计具有一定的参考价值。
MM74HC4046 感应加热电源 相关文章:
- 几种感应加热电源产品性能比较分析(07-31)
- 电源设计小贴士 1:为您的电源选择正确的工作频率(12-25)
- 用于电压或电流调节的新调节器架构(07-19)
- 超低静态电流电源管理IC延长便携应用工作时间(04-14)
- 电源设计小贴士 2:驾驭噪声电源(01-01)
- 负载点降压稳压器及其稳定性检查方法(07-19)