新能源最给力:实时内核的电动车电子差速仿真
必须通过调用os-tsK-pass()函数来完成,它将立刻切换到下一个准备好的任务。除此之外,还可以通过给任务分配不同的优先级,按优先级抢占调度的时序运行。
在ARTXl66实时内核中,任务或进程间的通信主要采用了以下4种方法:
①事件标记。它主要用于任务间的同步,每个任务分配有多达16个事件标记,任务的继续(或唤醒)可以选择等待所有的事件标记或是只等待其中的一个或几个。事件标记也可以通过外部中断程序进行设定,从而与外部事件进行同步。
②信号量。它是载有虚拟令牌的二进制信号量,用于解决多个任务占用公共资源的情况。在同一时间内,该令牌只能交给一个任务,避免了任务间的干扰。没有令牌的任务将处于睡眠状态,只有在得到令牌之后,该任务才会被唤醒。另外,为了防止进入错误状态,可以为等待令牌设置一个时限。
③互斥锁。它用于锁定共同资源,只允许一个任务占用,其他任务是封锁的,直到互斥锁被释放。
④邮箱。它主要用于任务之间信息的交换。
4 电子差速系统及其控制流程
电子差速系统是一种基于CAN总线的分布式四轮电子差速系统。它由1个中央控制器、4个电动轮控制器及CAN总线网络3个部分组成。
该分布式系统的电子差速实时控制过程为:中央控制器通过A/D采样获得来自转向传感器的车辆转向角度信号以及来自手柄转把中的车速设定信号,经过整车差速算法,分别获得4个车轮当前各自应有的转速,并将这一结果作为当前时刻对应车轮的转速控制设定值,通过CAN总线发送给相应的电动轮控制器;4个车轮控制器以从CAN总线收到的转速设定值为控制目标,使用电动转速控制算法对各自的电动轮进行控制,使各个电动轮的实际转速实时满足整车差速算法的要求,进而实现电动车辆的平顺转向。
5 电子差速算法仿真平台及实验平台设计
5.1 电子差速算法本体的仿真模型
图2中,速度基准值模块通过加速信号等确定Vref(Vref=ωr×r)。Vref为速度基准值,即转向时前轴外侧轮的转速值。此轮为4个轮子中转速最大的轮。比例模块通过查表确定各个轮速与Vref的比例值,转向模块确定转弯的方向。

5.2 电子差速算法仿真结果
在转向、加速、刹车3种信号作用下,4个轮子的转速如图3所示,从中可以清楚地看出电子差速的效果。在时间为1时,由于减速,V1、V2、V3、V4同时减小,同时由于转向发生变化,在电子差速作用下,V1、V3瞬时增大,而V2和V4瞬时减小,且变化数值不同。在3和4之间,4和5之间,8和9之间转向也发生变化,电子差速起作用,V1、V3瞬时增大或减小,而V2和V4瞬时减小或增大,且变化数值不同。在5和7之间由于刹车,各轮速度为O。
 5.3 电子差速算法实验平台的设计
5.3 电子差速算法实验平台的设计
该实物实验系统的结构主要包括:1台作为监控设备的PC机及1辆自行构建的具有4个电动轮的低成本电动车实物模型。这两个部分通过一个自制的简易 CAN/USB网关相连,构成了整个系统的主体。
PC机作为该实验系统中重要的人机接口之一,用于监视及评价整个系统的运行状况。通过对电动车实物模型上CAN总线消息的在线监听,PC机可以在不干扰电动车运行的前提下实时获得电动车中央控制器、各个电动轮驱动控制器的运行情况;还可在PC机上对获得的数据进行曲线绘制,并且可将接收到的大量有效数据保存在PC机的硬盘中,为更为复杂的离线分析提供可能。
CAN/USB网关是连接本实验系统中上位PC机与电动车实物模型的桥梁,是实现现场数据采集的重要设备。该网关完成了CAN总线与USB线的物理接口及协议转换,具有双向通信及一定的数据缓冲能力;支持USB2.O高速传输协议,通过编程可以支持传输速度最高达1Mb/s的CAN总线通信。
5.4 电子差速算法实验平台的试验结果
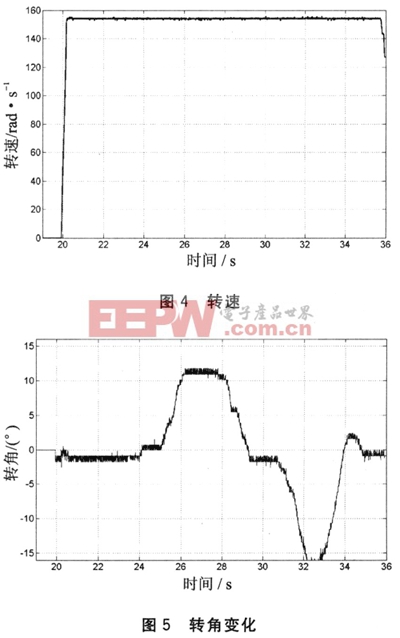
在不考虑加速度信号的影响下,转角发生变化时,利用该平台得出各轮速度变化。转速设定如图4所示,转角变化如图5所示。
随着转角的变化,各个轮子速度变化如图6所示。
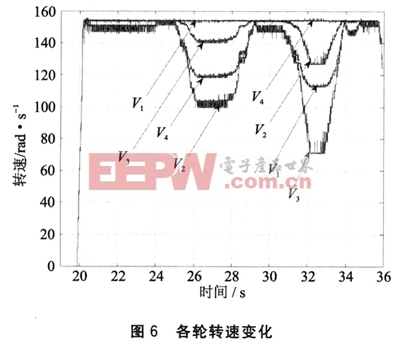
从图6中可以看出,转角各个变化过程中对应各轮速度的变化。当转角由O增大到最大值时(向右转向),V1为前轴外侧轮,速度最大,即V1为 Vref(Vs),此时的目标车速Vs(V1)为转角为O时的车速,故V1保持不变,V2、V2、V4根据电子差速算法相应的减小;当转角为最大值时,V2、V3、V4减小的趋势停止,随后转角由最大值减小到0时,V2、V3、V4增大到与V1相同。当转角由0减小到最小值时(向左转向),V4为前轴外侧轮,速度最大,即V4为Vref(Vs),此时的目标车速Vs(V4)为转角为O时的车速,故V4保持不变,V1、V2、V3根据电子差速算法相应的减小;当转角为最小值时,V1、V2、V3减小的趋势停止,随后转角由最小值增大到O时,V1、U2、V3增大到与V4相同。
6
- 小电源,大应用(12-05)
- 五大新能源汽车电池盘点(01-11)
- 新能源汽车技术是节能减排提高燃油效率的强力推进者(11-25)
- 基于风险管理在新能源电池在开发及生产中的应用(11-25)
- 一种三有源桥变流器的建模和控制(12-14)
- 节能家电电源整体解决方案(11-20)