交互式应用一举两得 实时仿真与嵌入式系统并构
时间:02-14
来源:互联网
点击:
e arguments指定目标机的IP、冗长度和TCP端口号,如图6所示,就可以建立连接了。

图6 External Target Interface对话框设置
打开External Mode Control Panel,如图7所示。点击Connect按钮,执行Start real-time code,可以看到Scope上的图形输出。此时,可以改变模型的参数(如增益的数值),参数下载后Scope的曲线将随之改变。仿真时间结束以后,可以看到产生了一个external.mat文件,由目标机会传到主机,放在Tornado的安装根目录下。
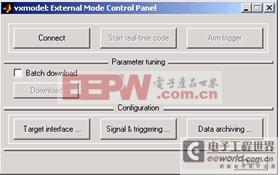
图7 External Mode Control Panel对话框
4、结论
针对Matlab的仿真特性和VxWorks操作系统的实时特点,本文介绍了RTW面向Tornado(VxWorks)实时目标的运行结构,并且较为详细的阐述了Tornado(VxWorks)实时目标的具体实现流程,实现了Simulink在Tornado(VxWorks)实时目标下的仿真。在结合相关文档的同时,加入亲身实验的经验,增补了一些必要的内容,完善了实验的具体步骤,降低了今后实验的调试难度。
- 嵌入式系统电源设计决巧,搞定电压转换!(12-07)
- 基于ARM11的电梯综合检测系统的研究(05-17)
- 小尺寸电源解决方案(11-20)
- 便携嵌入式系统电源的设计原则(07-08)
- 探讨嵌入式系统电源设计方案(08-28)
- 新型嵌入式系统电源监控模块设计(06-21)