基于高性能全数字式正弦波逆变电源的设计方案
本文提出一种高性能全数字式正弦波逆变电源的设计方案。该方案分为前后两级,前级采用推挽升压电路将输入的直流电升压到350V左右的母线电压,后级采用全桥逆变电路,逆变桥输出经滤波器滤波后,用隔离变压器进行电压采样,电流互感器进行电流采样,以形成反馈环节,增加电源输出的稳定性。升压级PWM驱动及逆变级SPWM驱动均由STM32单片机产生,减小了硬件开支。基于上述方案试制的400W样机,具有输出短路保护、过流保护及输入过压保护、欠压保护功能,50Hz输出时频率偏差小于0.05Hz,满载(400W)效率高于87%,电压精度为220V±1%,THD小于1.5%.
逆变电源应用广泛,特别是精密仪器对逆变电源的性能要求更高。高性能逆变电源不仅要求工作稳定、逆变效率高、输出波形特性好、保护功能齐全,还要求逆变电源小型化、智能化、并且具备可扩展性。文中提出一种基于STM32系列单片机STM32F103VE的纯数字式正弦逆变电源,该电源的全部功能由单片机控制实现,具有输出电压、频率稳定,效率高,保护功能齐全的特点。
系统设计
系统的整体框架如图1所示。系统采用高频逆变方案,即前级升压加后级逆变的结构,这样可以避免使用笨重的工频变压器,有效的降低了电源的体积、重量及成本,提升电源的效率。电路的工作原理是,12 V的直流输入电压经过滤波后由推挽升压和全桥整流升压到350 V的直流母线电压,再经过全桥逆变电路转变为220 V/50 Hz的工频交流电,采样电路对相应点进行采样,以实现闭环控制及保护功能。
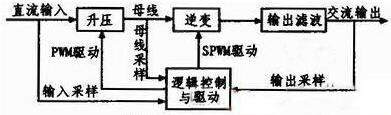
图1
由于大电流条件下,功率管驱动信号占空比过小会导致发热严重,效率降低,故逆变电源的前级采用准开环的控制方式,即输入电压在一定范围内时,驱动信号占空比开到最大并保持不变,输入电压过高时,减小占空比,维持母线电压在一定范围内。这样做的好处是,可以使前级升压获得较高的效率。
系统硬件设计
逆变电源硬件结构如图2所示。主要包括直流推挽升压电路、正弦逆变电路、输出滤波电路、驱动电路、采样电路、主控制器和点阵液晶构成。其中,直流升压部分将输入电压升高至输出正弦交流电的峰值以上的母线直流电压,正弦逆变部分将母线直流电压逆变后经输出滤波电路得到正弦式交流电,采样电路则对母线电压、母线电流、输出电压、输出电流、输入电压进行采样,以实现短路保护、过压欠压保护、过流保护、闭环稳压等功能。驱动电路的功能是将驱动信号的逻辑电平进行匹配放大,以满足驱动功率管的要求。控制电路的功能是产生驱动信号,并对采样信号进行处理,以实现复杂的系统功能。点阵液晶的功能是显示系统工作信息,如果输出电压、电流以及保护信息等。
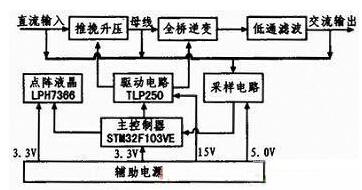
图2
1)主控制器
主控制器选用STM32F103VE增强型单片机,STM32系列单片机是意法半导体公司专门为高性能、低成本、低功耗的嵌入式应用设计的产品。此单片机采用哈佛结构,使处理器可以同时进行取址和数据读写操作,处理器的性能高达1.25 MIPS/MHz.支持单周期硬件乘除法,最高时钟频率72 M,最大可达512 kB片上Flash及64 kB片上RAM.同时具有多达30路PWM及3个12位精度的ADC等众多适合做逆变及电机驱动的外设。在本系统中用于产生PWM、SPWM驱动信号,并对采样信号进行处理,以完成稳压反馈及保护功能,并驱动点阵液晶显示系统信息。考虑实际的功率管及驱动芯片的速度,升压PWM波的频率为20 kHz,逆变SPWM波的频率为18 kHz.根据调制方法的不同,SPWM驱动信号形式可以分为:双极性、单极性和单极性倍频。由于双极性调制失真度小,故本设计中SPWM采用双极性驱动方式。
2)点阵液晶
选用LPH7366型点阵液晶,具有超低功耗的特点。用于显示系统当前的工作状态,如输出电压、输出电流、输入电压等信息。同时指示系统是否处于保护以及处于何种保护状态。
3)辅助电源
为系统不同部分提供不同的电压电需求,由直流输入电压经LM2596—5 V降压到5.0 V后一部分为采样电路供电,另一部分经LDO稳压器LM117—3.3 V稳压到3.3 V供处理器及点阵液晶使用。同时,由推挽变压器的一个辅助绕组得到20 V左右的电压,经整流滤波及LM2596-ADJ稳压到15 V后供驱动电路使用。
4)驱动电路
选用东芝半导体公司生产的高速光耦隔离型IGBT/MOSFET驱动芯片TLP250.TLP250具有隔离电压高、驱动能力强、开关速度快等特点。驱动电路的原理图如图3所示。
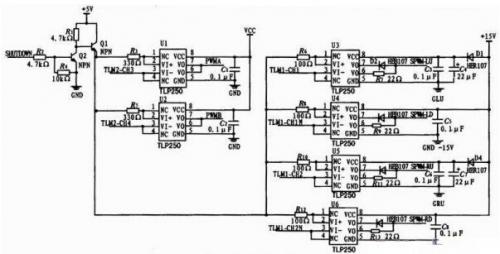
图3 驱动电路原理图
在推挽升压驱动(U1、U2)中,TLP250负责驱动信号幅值与电流的匹配,而对于全桥逆变驱动(U3、U4、U5、U6),不但要考虑驱动电平和驱动能力,还要考虑好上下管驱动信
- 中小功率光伏用逆变电源现状发展分析(12-09)
- 一款基于UC2525的交流逆变电源设计(12-08)
- 弧焊逆变电源的谐波分析和抑制(12-08)
- 逆变电源及逆变电源的原理(12-08)
- 逆变电源的SPWM波形发生电路(12-08)
- 关于纯逆变电源逆变器的介绍(12-08)