基于FPGA的三相直流无刷电动机变频控制的远洋捕捞装置电路
种状态,所以可以根据这六种位置状态信息来分配IGBT的驱动信号。在这里我们优先选用了IGBT的上桥臂用分配PWM信号,下桥臂分配高低电平的驱动方式,所以可以通过改变上桥臂PWM的占空比来改变加在直流无刷电动机上的端电压。信号分配和位置关系如图3-3所示。
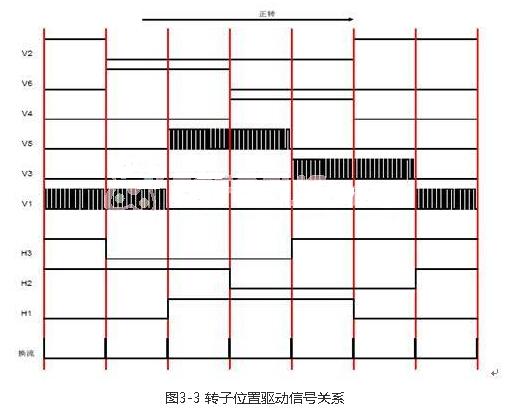 其中:V1、V2、V3、V4、V5和V6表示IGBT组成的三相全控桥电路,上桥的V1、V3和V5三个功率管,下桥的V2、V4和V6三个功率管,分别控制这U、V和W三相直流电的流向,如图1-1所示连接方式。H1、H2和H3是霍尔传感器的三个信号出线。
其中:V1、V2、V3、V4、V5和V6表示IGBT组成的三相全控桥电路,上桥的V1、V3和V5三个功率管,下桥的V2、V4和V6三个功率管,分别控制这U、V和W三相直流电的流向,如图1-1所示连接方式。H1、H2和H3是霍尔传感器的三个信号出线。如果正转的位置信号和驱动信号的关系如图2所示:010(H3 H2 H1)V6-V1、011(H3 H2 H1)V5-V6、001(H3 H2 H1)V4-V5、101(H3 H2 H1)V3-V4、100(H3 H2 H1)V2-V3、110(H3 H2 H1)V1-V2的顺序来换流的话,那幺我们可以同样根据位置信号给出反转时驱动信号的换流关系。即:001(H3 H2 H1)V1-V2、011(H3 H2 H1)V2-V3、010(H3 H2 H1)V3-V4、110(H3 H2 H1)V4-V5、100(H3 H2 H1)V5-V6、101(H3 H2 H1)V6-V1。具体电机的相序一定要搞清楚,如果换流不对或不当的话直流无刷电动机就会左右振动根本旋转不起来,或者电流很大且电流波形是不对的。
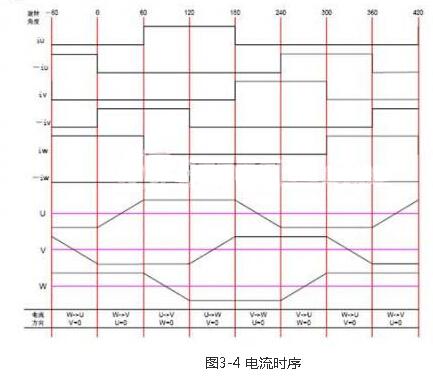
通过上述控制信号来控制各个功率管的on/off,使得电流依序流入U、V、W三相线圈,而在直流无刷电动机的内部产生旋转磁场,如图3-4所示,指出了在控制信号的作用下各相的电压、电流方向的关系。
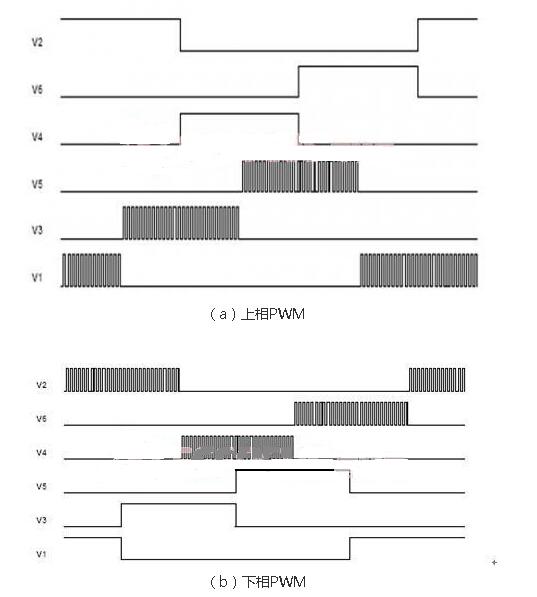
在控制功率组件的信号中加入PWM,调整PWM的占空比,即输出PWM的Duty,使得调整输入电动机的端电压的大小,进而控制直流无刷电动机的转速,其中控制信号PWM的加入有四种方式:上相PWM、下相PWM、前半PWM和后半PWM。如图3-5所示。
FPGA调制PWM波形原理
拟采用FPGA控制三相直流电机,利用其中的EAB可以构成存放电机各相电流所需的控制波形数据表和利用FPGA设计的数字比较器可以同步产生多路PWM电流波形,对三相直流电机进行灵活控制。使用FPGA实现多路PWM控制,无须外接D/A转换器,使外围控制电路大大简化,控制方式简洁,控制精度高、控制效果好。用单片机和DSP的控制都难以达到同样的控制效果。
FPGA模块设计是由PWM计数器、波形ROM地址计数器、PWM波形ROM存储器、比较器等模块组成。其中,PWM计数器在脉宽时钟作用下递增计数,产生阶梯形上升的周期性锯齿波,同时加载到各数字比较器的一端;PWM波形ROM输出的数据分别加载到各数字比较器的另一端。当PWM计数器的计数值小于波形ROM输出数值时,比较器输出低电平;当PWM计数器的计数值大于波形ROM输出数值时,比较器输出高电平。由此可输出周期性的PWM波形。根据三相直流电机对电流波形的要求,将各个时刻细分电流波形所对应的数值存放于波形ROM中,波形ROM的地址由地址计数器产生。通过对地址计数器进行控制,可以改变三相直流电机的旋转方向、转动速度、工作/停止状态。
直流无刷电动机远 相关文章:
- 电源设计小贴士 1:为您的电源选择正确的工作频率(12-25)
- 用于电压或电流调节的新调节器架构(07-19)
- 超低静态电流电源管理IC延长便携应用工作时间(04-14)
- 电源设计小贴士 2:驾驭噪声电源(01-01)
- 负载点降压稳压器及其稳定性检查方法(07-19)
- 电源设计小贴士 3:阻尼输入滤波器(第一部分)(01-16)