基于图像处理技术的智能照明控制研究
1 前言
智能照明控制是在“以人为本”作为前提的条件下, 对照明器具实行自动控制(包括: 照度的自动调节、灯的自动开关以及局部区域照度的控制)的行为。它应该符合两个相对独立的要求:
(1)给人提供一个舒适的工作环境, 以保证工作人员具有较高的工作效率;
(2) 通过合理的管理以节约能源和降低运行费用。具体说来, 上班时间, 智能照明控制系统自动调节光照度于最合适的水平。在天晴时, 灯光自动调暗; 在天阴时, 灯光自动调亮。
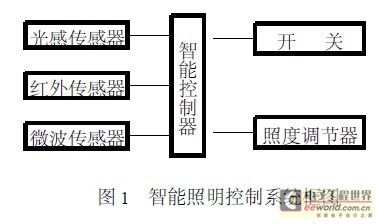
同时, 利用红外及微波传感器探测是否有人工作,当无人工作时, 自动转入“夜间”工作状态。其原理框图如图1 所示。为了使工作人员有一个舒适的工作环境, 使用调光电子镇流器调光, 以减少工作人员长期工作而引起眼睛的疲劳感。随着时间的推移, 灯具的老化和房间墙面反射率不断衰减而引起照度下降, 而设计时的照度值高于标准照度值。这样, 在使用初期时, 既浪费能源, 又缩短灯具的寿命。为了保持照度维持基本不变而节约能源, 因此,可以通过智能控制来实现。但是, 该智能照明控制在工程施工中工作量大, 要求安装较多的传感器,特别是光传感器要分布在不同的地方。本文设计了一种基于图像处理技术的智能照明控制系统, 以解决上述问题。
2 基于图像处理技术的智能照明控制系统
图像处理技术是始于20 世纪50 年代, 1964 年美国喷射推进实验使用计算机对太空船送回的大批月球照片处理后得到了清晰逼真的图像。70 年代初, 由于大量的研究和应用, 图像处理技术已形成较完善的学科体系。数字图像信息可看成是一个二维数组f ( i , j) , 对图像各象素进行处理时, 输入图像F 上某象素的灰度值为f ( i , j) , 进行某种P 处理, 得到输出图像上该象素的灰度值为g ( i ,j) , 即:
g ( i , j) = p ( f ( i , j) )因此, 如果将某一区域内的光照度大小的分布, 通过CCD 传感器变成一幅图像的象素灰度值, 那么,就可以将该区域的光照度大小的分布输出为一个待处理的二维数组f ( i , j) , 满足如下关系:
f ( i , j) = p ( z ( x , y) )式中, z ( x , y) 为区域内的光照度分布函数;f ( i , j) 为该区域内的象素灰度值形成的数组元素;p ( z) 为变换关系。
假设该数组的元素为: aij , 表示某矩形区域单位面积的照度值。并假设该数组为: m ×n (即m行n 列) 。f ( i , j) 称为照度矩阵:
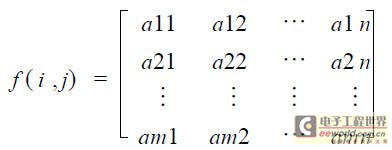
可知: 该区域的平均照度为:

当该区域的平均照度值处在所要求的照度值范围内时, 执行机构维持现状不变; 否则该区域的平均照度值不满足设计要求, 通过执行机构将该区域的照度值加大或减小, 以满足设计需要。
基于图像处理技术的智能照明控制系统的框图如图2 所示。其工作原理是:
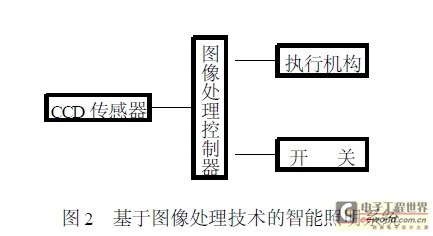
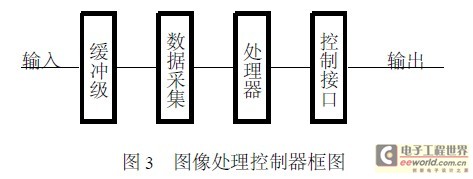
CCD 传感器将某一区域的照度值传送给图像处理控制器, 控制器将获取的数据进行运算。即计算区域的平均照度, 根据使用要求判别某象素值或某局部区域象素平均值是否在要求的域值内, 如果是在要求的域值内, 则认为照度合适; 反之, 说明照度过大或过小。控制器根据需要控制执行机构进行调光, 达到合适的照度要求为止。判断是否有人走动的方法是: 将过道(人走动所经过的) 区域的图像分割出来, 该区域的象素值在没有人走动时基本不变或变化很小。当有人走动时, 该区域的象素值变化较大。假设t0 时刻没有人走动时, 该区域象素值分布为f t0 ( x , y) , 经过δt (如: 1 S ) 时间后,该区域的象素值分布为f t1 ( x , y) , 计算差值: δf( x , y) = f t1 ( x , y) - f t0 ( x , y) 。如果δf ( x ,y) 内各象素值的绝对值之和较大, 可以认为是有人在走动; 如果δf ( x , y) 内各象素值的绝对值之和较小或为零时, 则可认为没有人走动。从而控制灯光的有无。图像处理控制器的原理框图如图3 所示。
显然, 处理器处理象素的速度要尽可能地快。
因此, 为了提高处理速度, 在进行图像处理计算时,不是一个一个象素的处理, 而是采用先将图像进行分割成更小块的图像进行处理的方法进行。由于DSP 技术在数字图像的处理方面有其独特的优势,所以采用DSP 技术进行数字图像的滤波以改善图像的信噪比。此外, 相邻象素之间具有一定的相关性,利用图像相邻象素之间的相关系数来提取亮域和暗域之间的边界。提高控制的准确度, 大大地延长了灯具的使用寿命。
基于图像处理技术的智能照明系统由于采用了CCD 摄相传感, 在工程布线以及传感安装上, 大大降低了工作量, 可靠性高。采用光传感器必须要求在各控制点安装传感器, 布线极为复杂, 可靠性不高。
基于图像处理的程序流程图如图4 所示。初始化系统后, 经过采集图像数据, 将采集来的数据进行计算: 先进行图像分割, 然
图像处理技术智能照明控 相关文章:
- 电源设计小贴士 1:为您的电源选择正确的工作频率(12-25)
- 用于电压或电流调节的新调节器架构(07-19)
- 超低静态电流电源管理IC延长便携应用工作时间(04-14)
- 电源设计小贴士 2:驾驭噪声电源(01-01)
- 负载点降压稳压器及其稳定性检查方法(07-19)
- 电源设计小贴士 3:阻尼输入滤波器(第一部分)(01-16)