三相PWM电机驱动器A3936及其应用[图]
平时,使能同步整流模式,此时负载电流按照控制逻辑选定续流模式进行续流。在续流期间,同步整流控制电路开通对应MOSFET管,以使得负载电流同时可以通过MOSFET管续流,从而降低续流时的导通电压,减小导通损耗。同时,该同步整流控制电路还考虑了死区保护,故可防止桥臂直通。
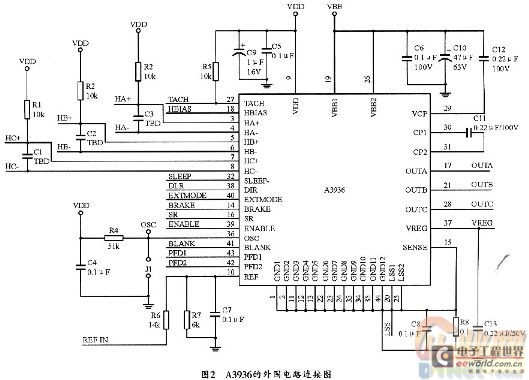
3 A3936的应用电路
A3936无刷直流电动机驱动集成电路由于其集成度高,外围元件少,使用起来非常简便。其外围电路连接图如图2所示。
电路连接后,便可设置续流控制模式和同步整流模式(也可不用)。之后,只需给出电动机旋转的方向(由38脚的控制逻辑决定)和旋转的速度(由10脚REF 的电压决定),即可完成对电动机的控制。某型船载卫星电视接收系统的伺服驱动控制需要对接收天线的水平、俯仰和横滚三个方向进行伺服驱动控制,其控制核心采用PC104计算机,并利用其I/O口(25针并口)实现对A3936的控制。由于PC104的输出为数字量且需控制三台无刷直流电动机,因此,本设计增加了4路8位D/A转换电路MAX505和8位选通开关CD4099。MAX505用于控制电动机转速;CD4099则用于控制电动机的转向。其电路结构图如图3所示。
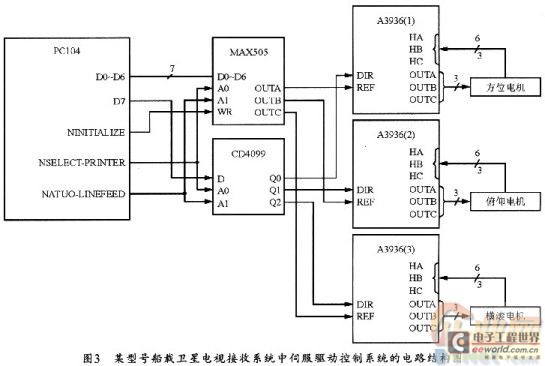
PC104标准并口具有12个输出位和5个输入位,其中8位数据位DO~D7中的D0~D6是送给MAX505的数据,可经D/A转换后用于控制无刷直流电机的转速。A0、A1是MAX505的地址线,可由PC104并口的14、17引脚控制,用于决定DO~D6应当转换到VOUTA、VOUTB、 VOUTC中的哪个输出端。WR为写控制端,由PC104并口的16引脚控制,但当数据写操作完成后,必须将WR端置1。D7代表转动方向(D7为0代表顺时针转动;D7为1代表逆时针转动),D7通常连接到CD4099的引脚3上,可以使CD4099根据A0、A1的地址数据将此方向的信息送到相应的输出端,从而控制相应A3936,并最终实现对相应无刷直流电动机的方向控制。当需要对无刷直流电动机进行控制时,只需对相应的地址(0X378、0X37A)写入控制字,便可实现对电动机的转动方向和转速的控制。
4结束语
A3936独特的续流控制模式,可使无刷直流电动机在不同负载时均可获得不同的负载电流波形,从而保证较高的控制精度。同步整流模式则可降低续流时的导通电压和功耗。由于A3936器件与计算机接口兼容,控制方式简单灵活,因而具有较高的应用价值。
三相PWM电机驱动器A393 相关文章:
- 电源设计小贴士 1:为您的电源选择正确的工作频率(12-25)
- 用于电压或电流调节的新调节器架构(07-19)
- 超低静态电流电源管理IC延长便携应用工作时间(04-14)
- 电源设计小贴士 2:驾驭噪声电源(01-01)
- 负载点降压稳压器及其稳定性检查方法(07-19)
- 电源设计小贴士 3:阻尼输入滤波器(第一部分)(01-16)