低频磁发射器设计
低频磁通信技术(LFMC)是有别于高频(RF)通信和红外通信的又一种简单可行“无线”通信手段,非常适合某些近距离传输数据应用,其主要优点有:
·极佳的磁穿透能力,可以穿透诸如水、水泥、塑料等一类非磁性材料。
·有限的但精确的控制距离,传输距离短即是缺点,又是优点,对某些特定的应用十分有用。
·低频设计技术,即可使用一般的运放、晶体管和其它积木块,电路的制作和检测也相对容易。
·低功耗,尤其在接收器一侧,还可通过磁耦合输送能量,实现无电源设计。
·低成本,使用可靠的无源LC谐振回路收发电路。
LFMC链路
LFMC是通过两个低频谐振回路实现连接的,主要是利用磁耦合技术,这与RF通信利用磁波传送信号有着本质上的差别。磁力线能穿透水、水泥、塑料等非磁性介质,信号衰减缓慢且不易畸变。在LFMC设计中,通常使用LC串联谐振回路作为传输源,信号检测则采用并联谐振回路。为了增加灵敏度,发射(TX)回路和接收(RX)回路谐振频率是相同的,此外,灵敏度还依赖于线圈平面之间的角度,因为磁力线垂直穿过线圈时灵敏度最高。
对多数LFMC应用,RLC谐振频率设在125KHz,电流通过线圈产生磁场,对单个线圈(图1),可以利用下式来计算距离辐射线圈P点的绝对磁场强度Bp:
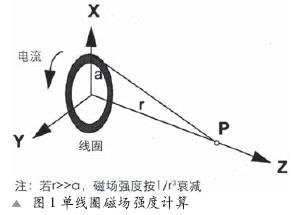
式中,wo是谐振频率(Rad/s);I为电流(A);N为线圈圈数;a为线圈的直径(m);r为自线圈的距离(m)。由上式可知,当距离r>>a时,磁场随r3而衰减。为实用起见,可将上式用电感上电压VL来表示:

对一个RLC串联谐振回路,常见的计算公式有:

注意,R表示谐振回路的总损耗,上述各式可计算谐振频率,最大电压与电流以及3dB带宽。
数据格式
在设计LFMC系统时,还必须选择一种数据调制格式。开—关键控(OOK)是一种最简单的调制格式,信号按接通或切断磁场信号源进行调制。由于脉冲信号的建立与衰减有一定的上升时间和下降时间,这是考虑波特率的主要因素,实用值取400mS或更长一些。其它考虑因素是接收器的设计和AGC电路的拓扑结构。
更有效的调制方案有曼彻斯特码、PWM和PPM(脉冲周期调制),它们之间的差别见图2。曼彻斯特码的优点是重复周期恒定,数据速率更有效。另一方面,PWM编码可简化接收器译码电路并改善误码率。考虑到通信电路是在噪声环境中工作的,因此无论采用那种编码格式,在实现通信协议时都要设置纠错方案。

驱动电路
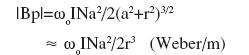
驱动谐振回路的最有效方案是D类放大器,半桥式或全桥式。半桥式结构(图3)具有成本低和容易实现的优点。上面已提及,发射侧采用串联谐振回路,且必须是高Q值谐振回路,这样,虽然驱动电路用方波激励,但通过电感线圈的电流绝大部分是基波分量。实现高Q值谐振回路,低容差、高品质电容是关键,我们可以选用质量好的聚酯薄膜电容,耐压在400V~600V之间。
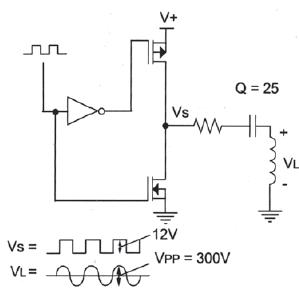
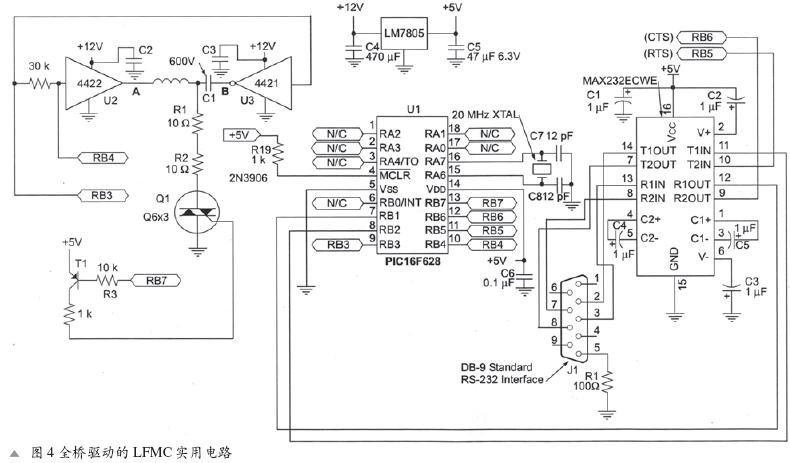
为了提高波特率,必须加速导通和关闭响应,图4是实现上述目的的改进电路,在此电路中采用全桥结构,并加入嵌位电路。全桥电路能加速上升时间,当幅度上升至满幅时,电路仍处于全桥结构。例如采用TC442 FET驱动电路,上升时间仅为40ms,比半桥式120ms快了很多。嵌位电路使用一个双向可控硅器件,在驱动电路关闭时让谐振回路放电,双向可控硅通常在零电压处点火,可减少EMI辐射。嵌位电路还有一个好处,就是能取消AGC电路,从而简化接收器的设计。
电路实例
实际驱动电路(图4)由TC4422(U2)和TC4421(U3)组成,U3是倒相放大器,U2则是同相放大器。U3是主要半桥驱动器件,U2仅在导通时使用。在导通的前5个周期,U2和U3图腾结构用作全桥驱动电路,此时U2和U3通过RB3由PWM电路输出驱动,RB4则用作输入,因而对U2输入信号没有任何影响。在5个初始周期后,驱动器转换 为半桥结构,这是通过将RB4从输入改变为低电平(零电平)输出实现的。这对U3工作没有影响,而将U2接地。当不需要快速上升时间时,也可以省掉U2,以增加电路的效率。
驱动信号直接用PIC微控制器的PWM单元产生,本设计使用PIC 16F628,时钟频率20MHz,为了得到125KHz工作频率,只需将其定时器2预定标为1,设定PR2寄存器为39,就可得到8ms周期信号。要想获得50%空度比的输出,将CCPR1L设置为14,CCP1CON从<5:4>设置为<0:0>。
串行通信由PIC 16F628 的UART实现,电平变换则用MAX232完成。CTS和RTS数据控制分别通过RB6和RB5输入。
结语
LFMC技术多用于射频标识和数据采集传输,而最近有报道,日本一家公司为了提高集成电路内部数据传输速度
- SoC发射器简化RF遥控器设计(04-28)
- 利用MSP430FR4xx实现红外遥控(06-09)
- 接收器与发射器的PCB设计目标(10-18)
- 射频及无线芯片测试基础知识解析(10-25)
- 应用于TPMS发射器的动态微带天线的设计(04-01)
- 无线发射器工作原理分析(01-04)