ZigBee定位解决方案
围布置参考节点,并利用最强的信号进行相关参考节点的定位计算。
由于第二种方法能够在定位引擎扩大覆盖面的同时不牺牲定位精度,因此更为可取。具体的工作原理是:网络中的待测节点发出广播信息,并从各相邻的参考节点采集数据,选择信号最强的参考节点的 X 和 Y 坐标。然后,计算与参考节点相关的其他节点的坐标。最后,对定位引擎中的数据进行处理,并考虑距离最近参考节点的偏移值,从而获得待测节点在大型网络中的实际位置(见图1)。
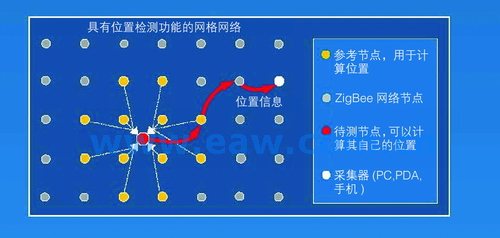
图1 表明定位位置和信息路径的ZigBee网络
为了达到最佳的定位范围,当布置参考节点时,应同时考虑到室内和室外环境中天花板/地板的吸附作用。最佳的方案就是使各节点处于相同的高度,并远离地面、天花板以及墙壁。在实际的部署过程中要达到这种要求,是比较困难的。因此,尽量将参考节点固定在天花板的高度或低于天花板的高度,并使天线倒置以使 RF 信号向外和向下传输,同时将待测节点(手持或固定于设备)放置在人的腰部以上、头部以下位置(此处提到的高度是以人站立在该环境中为标准的)。节点的这种设置方法实现了天花板和地板吸附作用的最小化,同时将实现在该场所中的行人或物体之间相互干扰的最小化。
定位引擎的精确性
为了确保定位引擎的室内性能,在办公环境中将采用具有 8 个参考节点的网络。根据现有表面将参考节点置于办公室的角落位置,如办公桌椅表面或其它介于人的腰部和肩部之间的表面。在图 2 中,8 个参考节点分别用 A~H 8个字母来命名。

图2 室内办公环境
在 6 个选定的位置采集定位估计值数据,每一位置的定位数据平均有 20 个读取点。相关测试结果如表1所示。

表1 8个参考节点的室内测试结果(所有数字的单位均为m)
在采集 8 个参考节点的数据后,将6个新增的参考节点添加到系统中。接下来,在 4 个相同的位置,重新进行定位估计测算,观察这些新增的参考节点对定位估计值的影响。
14 个参考节点的测量结果如表 2 所示。

图2 14个参考节点的室内测试结果(所有数字的单位均为m)
当节点位置进入网络的覆盖范围时,定位的精确性将明显提高。而且,当网络中设置的参考节点增多时,定位的精确性也将会不断提高。在本试验中,增设 6 个参考节点后,4个位置的定位精确性都会有所提高,同时降低了各定位报告位置的标准偏差(一致性)。
提高精确性
定位引擎采用来自附近参考节点的 RSSI 测量值来计算待测节点的位置。RSSI 将随着天线设计、周围环境以及包括若干其他因素在内的其他附近 RF 源的变化而变化。定位引擎将数个节点的位置信息加以平均。增加节点的数量,则可降低对各节点具体测试结果的依赖性,同时全面提高精确度。
无论在什么情况下设置参考节点,都会影响到定位的精确性,这主要是因为当参考节点设置在离相关表面很近的地方时,会产生天花板或地板的吸附作用。因此,应尽量使用在各方位都具备相同发射能力的全向天线。
结语
定位引擎实现了 ZigBee 网络射频的“房间式”精确性,而且功耗低,通信开销也实现了最小化。另外,定位引擎技术还能运用现有的 ZigBee 基础设施来确定网络中的位置。诸如此类的信息可由用于追踪目的的中央数据采集点轻松获取,用户也可使用该定位引擎技术完成楼宇内的导航工作。
- 基于Zigbee技术家用无线网络的构架(12-14)
- 基于精简协议栈的ZigBee网络节点研究(07-17)
- ZigBee无线传感器网络的研究与实验(02-08)
- 解析ZigBee堆栈架构(03-26)
- 组建SMAC协议构架的ZigBee星形网络(06-11)
- ZigBee基本技术问答(12-07)