基于CC2431的室内定位系统
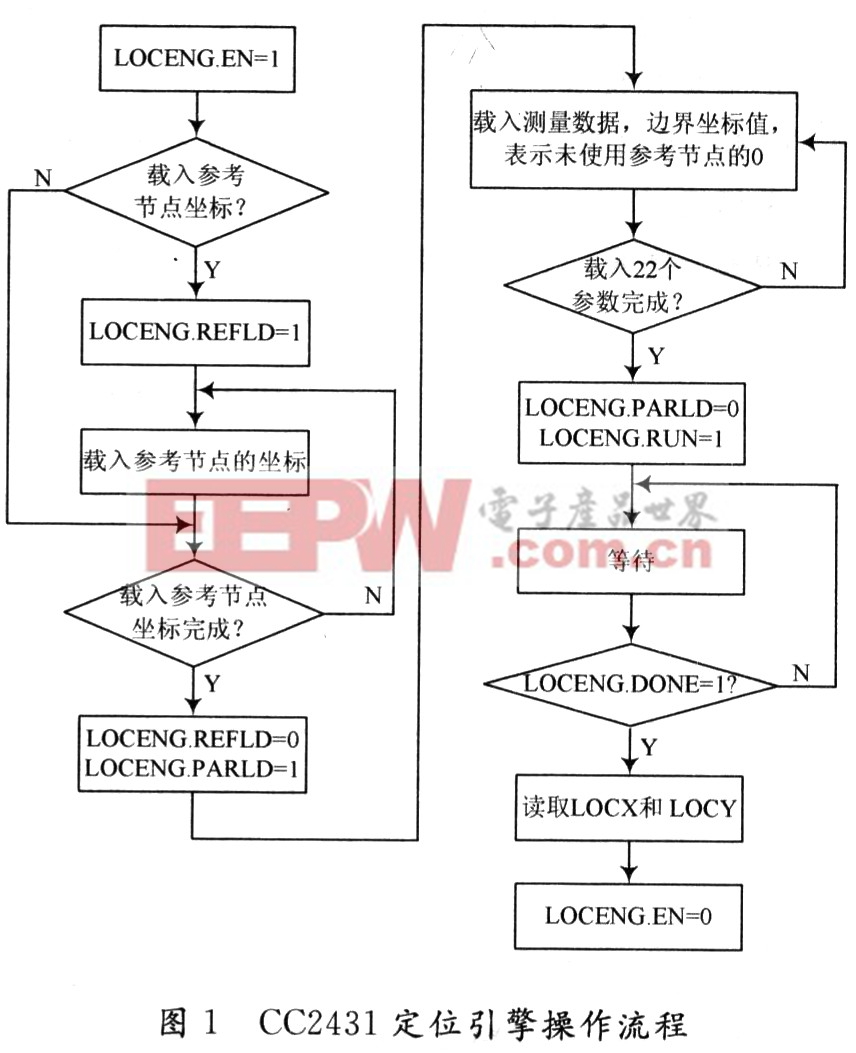
定位引擎需要3~16个参考节点的坐标[x0,y0,x1,y1,…,x15,y15]作为输入。参考节点的坐标表示每个参考节点的位置,是在[O,63.75]范围内的无符号数值。最高分辨率为0.25 m。所有参考坐标被装载入RF寄存器REFCOORD。在写入寄存器REFCOORD之前,寄存器LOCENG.REFLD位必须置1以指示有1组参考坐标要写入。16个坐标对都必须写入,当定位引擎使用的参考节点数少于16个时,为了标记某些参考坐标未使用,将0载入作为未使用的参考坐标值,这些参考节点的RSSI值为O.O。当所有参考坐标写入后,LOCENG.REFLD=0。定位引擎除了需要参考坐标外,还需要一组测量参数,这些参数包括:2个射频参数A和n,4个搜索边界坐标和16个RSSI值。定义参数A为距离发射机1 m参考距离下接收信号强度的绝对值,定位引擎要求参数A的范围为[30.0,50.0],精度为0.5。参数A为无符号定点值,最后一位为小数位,其余位表示整数部分。参数n被定义为路径损耗指数(描述信号功率随着距离的增加而衰减的速率),这种衰减正比于d=n(d表示发射机与接收机之间的距离)。在估算定位x,y坐标时,先设定搜索边界,以降低错误和估计时间,最大搜索区域的x,y范围为[0.0,63.75]。假设定位引擎搜索被限制在一个矩形区域,坐标为(xmin,ymin)和(xmax,ymax),输入定位引擎的4个搜索边界参数为xmin,xdelta,ymin,ydelta,其中xdelta=xmax一xminydelta=ymax-ymin,如果选择在整个可能的区域内搜索,则这4个参数值为:0.0,63.75,0.0,63.75。如果某个参数遗漏,则定位引擎无法正确地估算位置。RSSI值是对应于一组参考坐标的RSSI测量值,其范围在[一40 dBm,一95 dBm],精度0.5 dBm,写入时符号被去掉。如果使用的参考节点个数少于16个,则必须写入0.O作为接收信号强的度值。所有测量得到的参数都装载入RF寄存器MEASPARM。在写入MEASPARM之前,寄存器位LOCENG.PARID必须置1,以指示有1组测量得到的参数要写入。参数装载过程开始后,所有22个参数都必须被写入。测量得到的参数写入顺序为[A,n,xmin,xdelta,ymin,ydelta,RSSI0,RSSI1,…,RSSI15]。 当参考坐标和测量得到的参数写入后,通过将寄存器位LOCENG.RUN置1启动定位估计计算。当LOCENG.DONE置1时,估计得到的坐标可以从寄存器LOCX和LOCY中读出。LOCENG.RUN置1到读出估计坐标的时间间隔则根据搜索边界参数的不同在50μs~13 ms之间变化。定位引擎不产生任何中断请求。由LOCX寄存器给出的x坐标估计值包含一个偏移量,该偏移量必须被去除,以得到真实的x坐标。去除的方法如下:x=(xLOCX-xmin+1)%(xdelta+1)+xmin。可直接使用由LOCY寄存器给出的y坐标估计值。
2.2 CC2431定位系统的操作流程
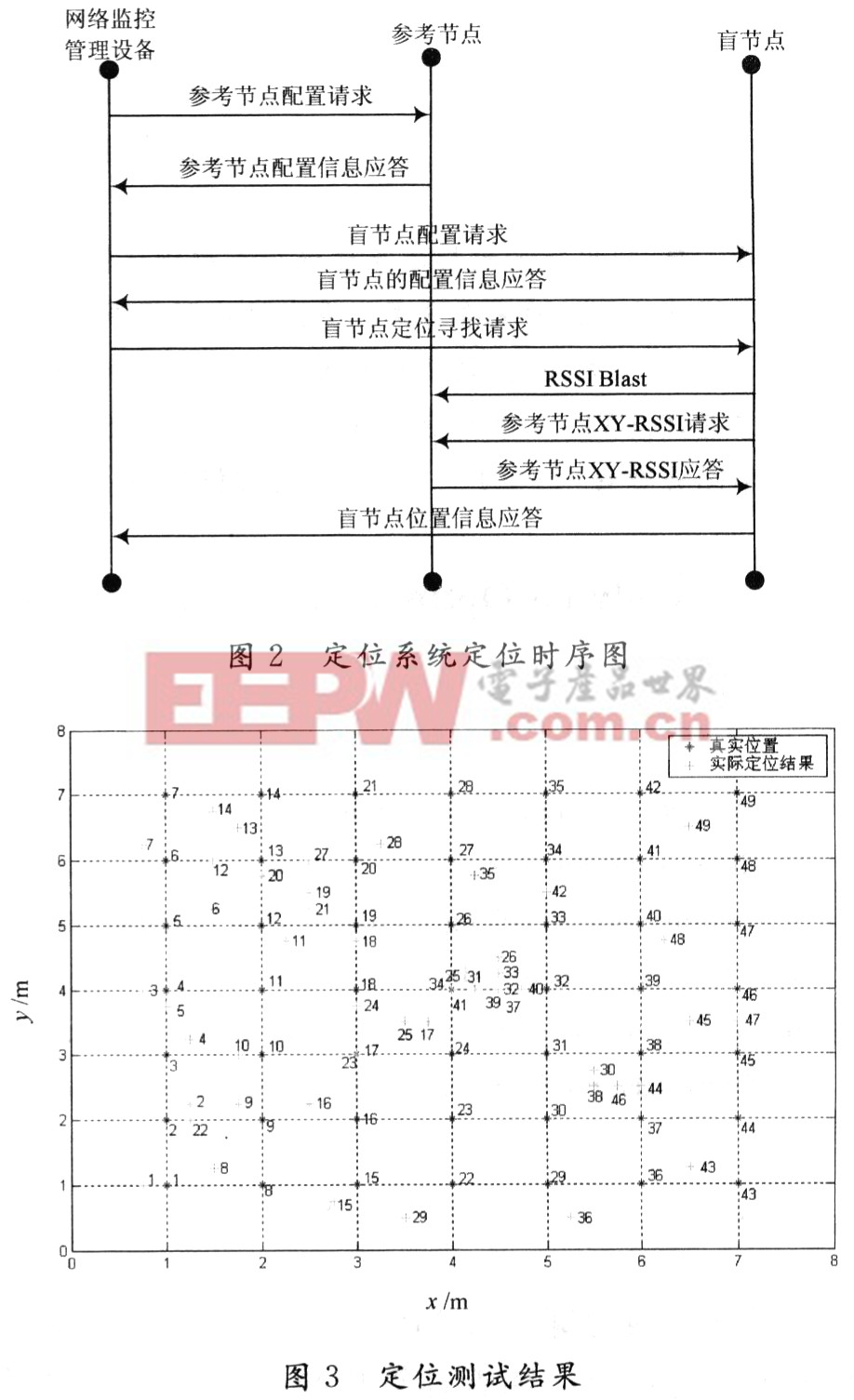
CC2431定位系统由网络监控管理设备、参考节点与盲节点组成。其中,网络监控管理设备使用串口发送和接收定位协议消息,它依附于主系统并且被用作汇聚节点接收盲节点响应、配置参考节点以及设置盲节点参数。当网络监控管理设备应用程序接收到盲节点的响应信息时,通过串口把数据传给主系统。盲节点包含CC2431定位引擎,定位引擎通过无线测距范围内应答的参考节点坐标以及发送至这些参考节点信息的。RSSI值完成定位运算。盲节点首先发出一定时序的RSSIBlast信息广播,当等待盲节点已配置完成规定的时间间隔后,盲节点向参考节点发出XY―RSSI请求广播,每个接收到RSSI Blast信息广播的参考节点将进行接收到信息的RSSI值计算,当接收到XY―RSSI请求时,参考节点将向盲节点发回其位置信息以及RSSI值。整个定位系统的定位时序图如图2所示。
3 实验测试及验证结果
这里以TI公司的CC2431节点作为实验平台,选择8.O m×8.0 m的实验室作为实地测试环境进行测试,在实验室的4个墙角及中间位置布置了5个CC2431作为参考节点,其位置已知且固定不动。盲节点对均匀分布在测试环境内的49个点进行定位测试,定位结果如图3所示:
根据获取的待定位节点坐标实测数据,通过Mat―lab进行数据处理,以得到系统的定位误差,定位误差的分布如图4所示:
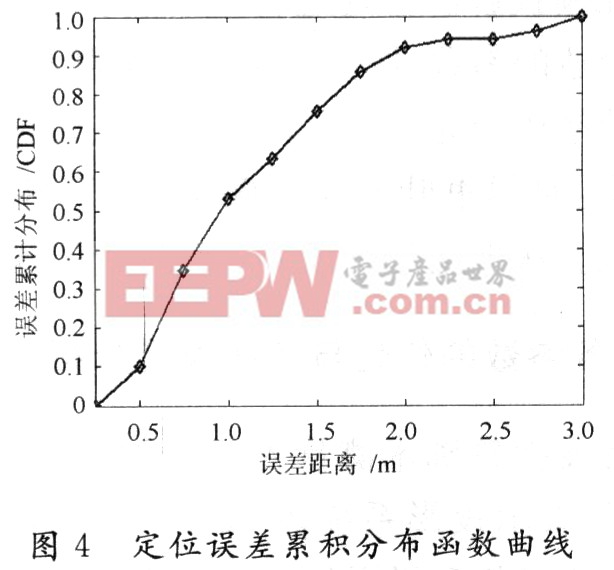
由图4曲线可以看出,在室内环境下,采用CC2431定位系统能够分别实现50%和90%的定位,结果误差前者在1.O m以内,后者在2.5 m以内,完全能够达到室内环境下定位精度的要求。
4 结 语
首先比较目前已有的室内定位技术的优缺点,重点介绍CC2431定位引擎的使用方法和CC2431定位系统的定位流程。完成了定位系统的部署,定位结果令人满意。CC2431能够满足低功耗、抗干扰、准确快速定位的要求,为室内定位提供具有竞争力的解决方案。
- 第四代移动通信系统中的多天线技术(08-05)
- 透析信道效应对MIMO系统运作效能的影响(01-18)
- 如何发展中国第二代导航卫星系统(02-02)
- 北斗卫星导航系统的特点(02-02)
- 基于无线传送的智能家居室内通信系统(01-03)
- 基于WiMAX技术的5.8G无线专网射频系统设计(10-06)