恒流多通道动物机器人遥控刺激系统的研制
1.2 无线信号发射台
无线信号发射台的作用是把Pc机设置的刺激参数以无线信号的形式发送到“背负式微刺激器”中去。它由下列几部分组成:无线信号发射机(Transmitter),由AMSlll7―3.3构成的降压稳压电路,Atmega8L微处理器,PC机串口与单片机串口之间的电平转换电路。无线信号发射台各部分电路的连接关系如图3所示。基于CCllOO无线收发器ccllOOA―01(立奇国际贸易有限公司)是一款低成本、低功耗的超高频(UHF)收发器,该模块的尺寸小(20 mm×30 mm×6 mm),重量轻(2.3 g),传输距离大于200 m,主要工作于ISM和SRD频率波段。

由于RS 232串口的逻辑O规定为5~15 V之间,逻辑1规定为一5~一15 V之间。而单片机只能接收TTL电平(输入高电平>2.4 V,输入低电平0.8 V,噪声容限为O.4 V)。因此,Pc机与单片机之间并不能通过串口线直接进行通信,必须经过电平转换,在此选用MAXIM公司生产的.RS 232接口芯片MAX3232,它使用单一电源电压供电,电源电压在3.0~5.5 V范围内都可以正常工作。该系统采用了9针串口,通过3根线完成通信:RXD,TXD和GND,对应9针串口上的2号线、3号线和5号线。在系统设计中,芯片MAX323采用5.0 V电压供电,单片机采用3.3 V电压供电。因此,选择3.3 V的稳压芯片AMSlll7―3.3,整个发射台可以通过USB接口从PC机取电。
2 背负式微刺激器的研制
对于整个系统来说动物背负式微刺激器占据着核心地位,它的重要性大于系统的其他部分,研制难度也较高。它既要求工作性能可靠,又要求能耗低,尺寸小。重量轻,遥控距离远。为了满足设计要求,该微刺激器的设计采用以下部分组成:Atmega8L微处理器、无线信号接收机、D/A转换芯片AD5310与()P07运算放大器构成的双相电压脉冲发生单元、双向模拟开关CD4051B、由运算放大器LM358和电阻构成的压控恒流电路、TC7660芯片组成的负压电路、TC7660芯片组成的倍压电路、发光二极管工作状态指示电路以及两块可充电聚合物锂电池(4.1 V,180 mAh)。
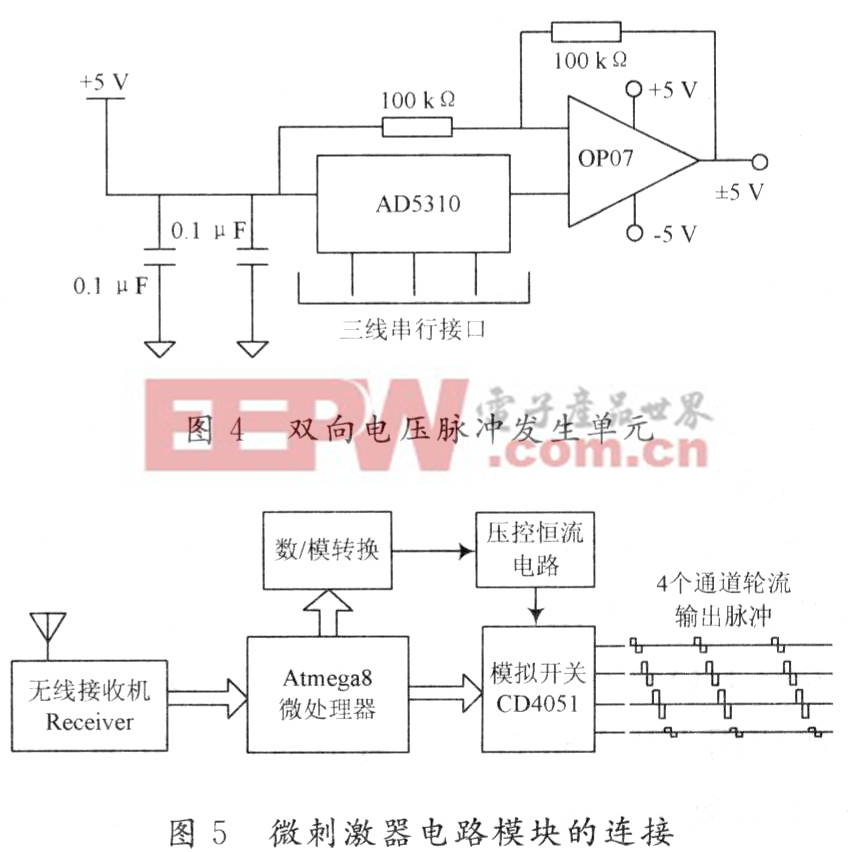
无线收发模块CCll00A一01既可以发送数据也可以接收数据,并且它的尺寸较小,重量较轻,因此,它也适合作为微刺激器遥控刺激参数数据的接收模块。单10位串行D/A转换芯片AD5310与()P07组合产生双相电压脉冲信号(如图4所示),这些双相电压信号通过由LM358和电阻构成的电压控制电流源电路(VCcs)转化为相应的双相恒流脉冲信号。模拟开关cD4051在单片机的控制下,把这些恒流脉冲轮流送到第一到第4个刺激通道,这样就在4个通道上依次产生需要的恒流脉冲信号(如图5所示)。该设备能够达到多通道联合刺激,并且每通道都是电流强度可调的双相脉冲。当需要选择4个通道中任意几个进行多点位联合刺激时,将不需要选择的那些通道刺激强度设置为0即可。为了提高电路带动负载的能力,选择4.1 V聚合物锂电池,通过TC7660进行倍压和负压,专用于给压控恒流电路和模拟开关CD4051进行±8.2 V供电;用于产生双相电压脉冲的运算放大器()P07选择±4.1 V供电;无线接收机用5 kQ和41 kQ电阻把4.1 V分成约3.6 V供电。在背负式微刺激器的设计中都采用小封装的表贴电子元件(0603封装),及电能密度大的聚合物锂电池(4.4 g,180 mAh)。因此,大大降低了该微刺激器整体尺寸,整体尺寸约为33 mm×24 mm×16 mm,带电池质量约为14.8 g,在大壁虎自由运动的负重范围之内。超低功耗的电路设计,使得该微刺激器在电池充满电时能够使用5个小时以上。经过适当的程序延时,该背负式微刺激器能够产生脉宽为1 ms,频率为50~125 Hz,强度约为O~40μA(负载电阻100 kΩ时)的双向恒流脉冲。由于该系统使用了成熟的商业无线通信模块,因此它的无线通信性能稳定,遥控距离约为200 m。
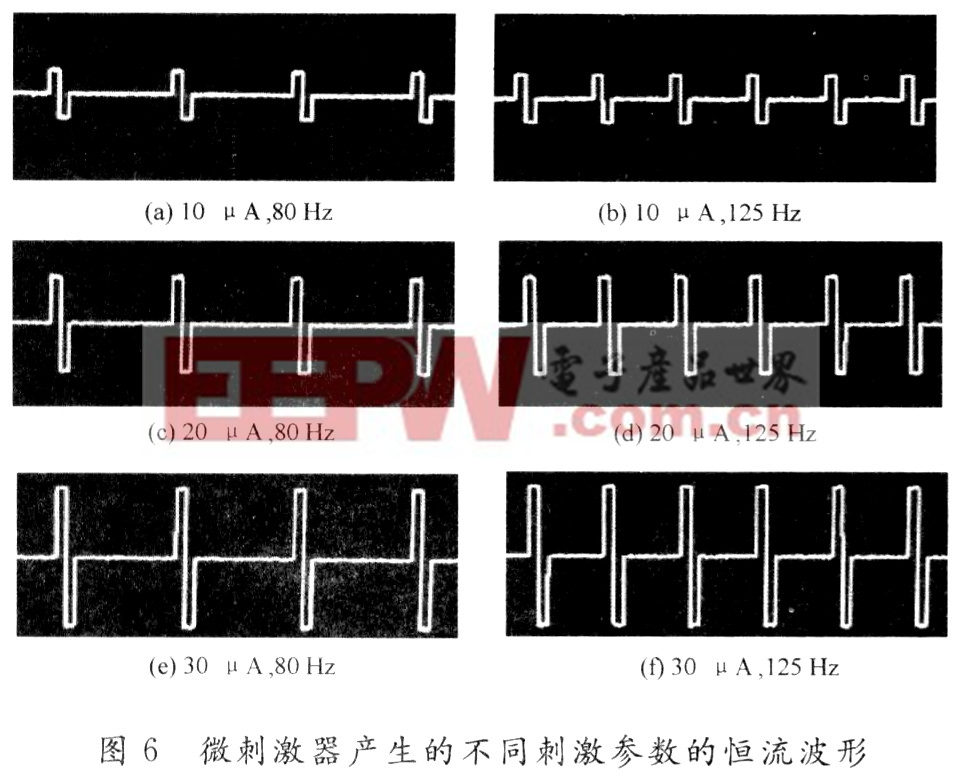
在大壁虎运动的人工诱导实验中,该设备对于敏感度居中以及中偏高的脑核团刺激表现的性能较好,能够满足对大壁虎运动脑核团刺激的强度,实现了控制壁虎运动行为的目标。但是,有些脑核团对电刺激不够敏感,或者是脑电极植入位置与脑核团实际位置偏差较大,其要求的刺激强度太大(40μA以上),这时大壁虎对电刺激的反应就不够明显。背负式微刺激器不能达到很高的刺激强度,是该设备的不足之处,但是,它对大壁虎基本运动(例如左转、右转、前进、躲避)的诱导已经能够满足要求。微刺激器产生不同刺激参数的恒流脉冲(100 kΩ负载端电压波形)如图6所示。
3 结 语
动物机器人遥控刺激系统,在动物机器人的研制中具有重要的意义。它的研制不但涉及电路设计,程序设计和无线通信方面的知识,还与生命科学有着密切的联系。在多学科科研人员的共同努力下,研制的背负式微刺激器能够实现多通道双相恒流脉冲刺激,并且每个通道的刺激强度可以灵活调节。此外,它还具有多点位联合刺激和延时刺激的功能。其尺寸小,重量轻,耗能低,无线通信距离远,适合于小型动物的在体刺激试验。
系统 研制 刺激 遥控 动物 机器人 通道 转换器 相关文章:
- 第四代移动通信系统中的多天线技术(08-05)
- 透析信道效应对MIMO系统运作效能的影响(01-18)
- 如何发展中国第二代导航卫星系统(02-02)
- 北斗卫星导航系统的特点(02-02)
- 基于无线传送的智能家居室内通信系统(01-03)
- 基于WiMAX技术的5.8G无线专网射频系统设计(10-06)