基于Cortex-M3的TFT触摸屏在环境监控系统中的应用
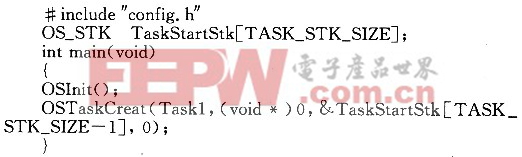
代码是用C语言中short,int,long等,数据类型是与特定的处理器相关的,因此在μCOS-Ⅱ重新定义为移植性很强的定义方式。在OS_CPU.H剩下的部分是移植必须定义底层函数的声明。在LPC1758的移植中为了使底层接口函数与处理器的状态无关,同时使任务调用相应的函数不需要知道函数的位置。在本移植中使用软中断指令SWI作为底层接口,使用不同的功能号来区分各函数。调用这些底层函数,只需要使用一条SWI指令并跟上一个功能号来区别你要调用那个函数即可。任务切换函数为OS_TASK_SW(void),并使用软中断0x00。CPU_C.C中主要是软中断的实现和底层函数的实现及初始化任务堆栈函数的实现,其伪代码如下: 移植μCOS-Ⅱ是为了在自己系统中使用μ肛COS-Ⅱ,要在自己的系统中使用μCOS-Ⅱ编写应用程序。应用程序包括相应的头文件,任务堆栈的宏文件和任务相关的文件。由于每个任务都是独立的,所以堆栈部分的宏定义的代码是应用程序必须要有的。建立任务之前必须初始化任务并建立一个空闲的任务。在建立多任务时,必须通过OSTaskCreat()函数建立至少一个用户任务。建立好任务后,利用OSStart()函数开始任务。应用函数主函数如下:
处理器能支持一定数量的数据存储硬件堆栈;用C语言可以开中断/关中断,根据不同的Num值跳转到不同的底层服务函数地址。
系统的应用程序包括三个任务:实时显示屏幕数据任务,采集数据函数,触摸屏响应任务。设计中采用了任务嵌套的方式,将数据采集和触摸屏响应嵌套到实时显示屏幕数据任务之中,这样数据在各个任务之间的传递很有逻辑性,整个系统比较健壮。任务间的通信如图8所示。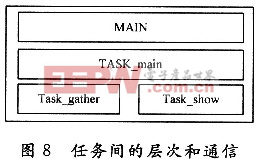
4 结语
利用LPC1758处理器成功验证了采用ARM公司Cortex-M3内核的MCU驱动TFT触摸屏的可能,包括以上硬件方案的提出和软件系统移植的实现,TFT触摸屏单元提供友好的人机界面,且具有坚固耐用、反应速度快、节省空间、易于交流等许多优点。随着多媒体查询的与日递增,在未来的电子产品中,触摸屏无疑将成为输入设备的主流。
监控系统 应用 环境 触摸屏 Cortex-M3 TFT 基于 相关文章:
- 基于WiMAx的武警部队无线视频监控系统(05-11)
- 无线基站或变电站网络数字监控系统(03-20)
- 详解:无线监控系统在应用中的六大问题(02-18)
- 基于CDMA 1X的远程监控系统设计(05-07)
- 基于Zigbee技术的温室大棚监控系统(06-04)
- 深入无线视频监控系统 智能应用或呈爆发式增长(06-29)