基于FPGA的Picoblaze核实现Modbus通信协议
摘要:给出了一种在Xinlinx的Spartan-3E评估板上实现Modbus通信协议的方法。该方法以PC为上位机,并在评估板上嵌入Picoblaze软核作为下位机来实现Modbus通信协议的功能。文中同时介绍了使用Xilinx ISE和Picoblaze软核进行开发的方法。
关键词:Modbus通信协议;Picoblaze核;FPGA;Spartan-3E评估板
0 引言
目前,从各大FPGA厂商公布的销售数据来看,Xilinx的FPGA市场份额占到了近50%。Spartan-3E系列的器件密度范围为10万到160万系统门,其单位逻辑单元的成本是FPGA行业中最低的,能够以标准产品价格实现微处理器、微控制器和数字信号处理器的功能,并可支持18种通用I/O标准,还可通过ISE来操作PicoBlaze软核。Spartan-3E同时结合了强大的平台FPGA功能和超低价位。因而可使更多的设计人员享受可编程能力所带来的益处。
1 Picoblaze核结构
本文采用Xilinx公司的Spartan-3E评估板及其PicoBlaze IP核来进行基于Modbus通信协议的系统设计。该系统的整体结构是以PC做为上位机,并在评估板上嵌入Picoblaze软核作为下位机,从而实现Modbus通信协议。PicoBlaze是Xilinx公司的一款8bit微控制器软核,它非常之小。可以嵌入到Cool RunnerⅡ,Virtex-E,Virtex-II(Pro)和Spartan-3E的CPLD以及FPGA中。对于整个指令集,PicoBlaze执行一条指令需要2个时钟周期。
在对PicoBlaze进行开发时,首先需要将PicoBlaze认识并执行的程序经过Assembler转换成相应的HDL文件并存放在FPGA内部的Block Memory中(因此,PicoBlaze执行一条指令所需的时钟周期是固定的)。然后,微控制器核心KCPSM3再从Block Memory里面读取程序并按顺序执行。PicoBlaze的存储空间为1024x18bit,也就是说,它能够存放1024条位长为18的指令。而PicoBlaze支持的指令集也很精简(只有57条),其中包含程序控制类(跳转,调用,返回)、算数类(加,减,比较)、逻辑类(与,或,异或)、中断类(中断开启/关闭),移位/旋转类(左移/右移,左旋/右旋)和输入/输出类(输入,输出)。PicoBlaze核的结构框架如图1所示。
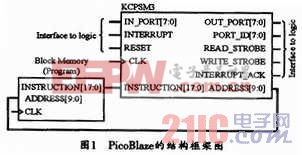
图2是微控制器核心KCPSM3的结构框架图。KCPSM3中一共有16个长度为8位的通用寄存器,每个寄存器都可以在汇编代码中分别命名。其中,Scratch Pad Memory的大小为64 Bytes,作用相当于一块临时存储区。KCPSM3只支持1个中断信号,但实际上可以将多个中断信号用逻辑组合的方式变成一个来使用(会降低单中断通道的性能)。

2 Modbus协议
2.1 Modbus协议简介
Modbus协议是应用于电子控制器上的一种通用语言。通过此协议,控制器相互之间、控制器经由网络(例如以太网)和其它设备之间可以实现通信。标准的Modbus接口使用RS-232C兼容串行接口,控制器通信使用主从技术,它仅有一个设备(主设备)能初始化传输(查询)。其他设备(从设备)则根据主设备查询提供的数据作出相应反应。
2.2 串行传输模式
在标准Modbus上,控制器可使用ASCII或RTU通讯模式来进行通讯。在本设计采用的是RTU模式。当控制器以RTU模式在Modbus总线上进行通讯时,信息中的每8位字节可分成2个4位16进制的字符,该模式的主要优点是在相同波特率下,其传输的字符密度高于ASCII模式,但每个信息必须连续传输。其RTU模式的数据传输格式如表1所列。

在RTU模式中,每个字节格式的编码系统可以为8位二进制、十六进制0~9和A~F。其数据位包括1位起始位,8位数据(低位先送)、奇/偶校验时1位/无奇偶校验时0位、带校验时1位停止位/无校验时2位停止位。本系统的错误校验采用循环冗余校验(CRC)。
2.3 Modbus的信息帧
无论是ASCII模式还是RTU模式,Modbus信息都以帧的方式传输,每帧有确定的起始点和结束点。表2所列即为RTU模式时的消息帧格式。
使用时,接收设备在信息的起点开始读地址,并确定要寻址的设备(广播时对全部设备)以及信息传输的结束时间。也可以检测部分信息,有错误也可作为一种结果设定。本文使用的是RTU消息帧。
在RTU模式中,信息开始至少需要3.5个字符的静止时间。依据使用的波特率,很容易计算这个静止的时间(如表2中的T1-T2-T3-T4)。之后,第一个区的数据即为设备地址。各个区允许发送的字符均为16进制的0—9,A—F。

网络上的设备可连续监测网络上的信息,包括静止时间等。当接收到第一个地址数据时,每台设备都立即对它解码,以决定是否是自己的地址。发送完最后一个字符号后,也将有一个3.5个字符的静止时间,然后才能发送一个新的信息。
整个信息必须连续发送。如果在发送帧信息期间出现大于1.5个字符的静止时间,则接收设备将刷新不完整的信息,并假设下一个地址数据。
同样,若在一个信息后立即发送一个新信息(若无3.5个字符的静止时间),将会产生一个错误。这是因为合并信息的CRC校验码无效而产生的错误。
RTU方式时,可采用CRC方法计算错误校验码,即用CRC校验传送的全部数据。它会忽略信息中单个字符数据的奇偶校验方法。
2.4 错误检测方法
标准的Modbus串行网络采用奇偶校验和帧检测两种错误检测方法,其中奇偶校验对每个字符都可用,而帧检测(LRC或CRC)则应用于整个消息。由于本文采用RTU模式进行数据传输,故使用CRC校验方法,它可校验传送的全部数据。其具体实现方法如下:
CRC码为2个字节/16位的二进制值。通常由发送设备计算CRC值,并把它附到信息中去;接收设备则在接收信息过程中再次计算CRC值并与CRC的实际值进行比较。若二者不一致,则产生一个错误。校验开始时,先把16位寄存器的各位都置为“1”,然后把信息中的相邻2个8位字节数据放到当前寄存器中处理。一般只有每个字符的8位数据用于CRC处理,而起始位、停止位和校验位不参与CRC计算。
CRC校验时,每个8位数据先与该寄存器的内容进行异或运算,然后向最低有效位(LSB)方向移位,当用零填入最高有效位(MSB)后,再对LSB检查,若LSB=1,则寄存器与预置的固定值进行异或,若LSB=0,则不作异或运算。
之后,重复上述处理过程,直至移位8次。最后一次(第8次)移位后,下一个8位字节数据再与寄存器的当前值进行异或,然后再重复上述过程。全部处理完信息中的数据字节后,最终得到的寄存器值即为CRC值。
CRC值附加到信息时,低位在先,高位在后。CRC生成的多项式是: 。
。
2.5 功能选择
本文选择03读保持寄存器和06预置单个寄存器来进行重点介绍。
(1)03读保持寄存器
查询信息时,寄存器寻址起始地址为0000,寄存器1~16所对应的地址分别为0~15。
响应信息中的寄存器数据为二进制数据,每个寄存器分别对应2个字节,第一个字节为高位值数据,第二个字节为低位数据。表3所列是03读保持寄存器的功能举例。
通信 协议 Modbus 实现 FPGA Picoblaze 基于 相关文章:
- 无线通信领域中的模拟技术发展趋势(蜂窝基站)(09-22)
- 新一代移动通信系统及无线传输关键技术(06-19)
- 蜂窝移动通信基站电磁辐射对人体影响的探讨(04-10)
- 无线升级到802.11n 应考虑的因素有哪些?(10-30)
- 第四代移动通信系统中的多天线技术(08-05)
- 4G移动通信系统研究进展与关键技术(12-24)