基于CANopen总线协议的城市地铁数据通信网设计

该列车通信网络系统参照TCN(Topology Change Notification)配置,采用的是CAN总线,列车编组单元内的车辆总线采用CANopen协议。
所设计的地铁列车通信网络系统是基于轻型、模块化和分布式设计,列车网络采用两级总线的层次结构。本系统采用两路CAN总线来将各子系统的控制单元合理地分配到这两路CAN总线上。每路CAN总线在Mp(带受电弓的动车)车上有一个中继器,各个子系统提供的CANopen接口都连接
到列车总线,以便于传递控制数据和状态数据。列车控制监控系统可监视各子系统设备,同时接收各子系统的故障和状态数据,并通过总线控制子系统以完成相应的功能。
一般情况下,在选择网络拓扑结构时,应考虑到网络的适应性、可靠性、可扩充性等性能,以选择合理的网络拓扑结构,从而实现机车设备级CAN总线网络物理层的高可靠性。本文选择的CAN总线型网络拓扑结构能够更好地运行列车自动系统,其中包括列车自动保护系统(ATP)和列车自动运行系统(ATO)。
2.2 VCU控制单元
城市地铁列车网络的硬件系统通常由列车车辆控制单元(VCU),远程输入输出模块(RemoteI/O Module,RIOM),司机显示单元(DDU),列车通信中继器(Repeater)等组成。其中列车车辆控制单元(VCU)用于通过车辆总线连接各子设备,负责列车网络中各种数据的传输和管理,列车车辆控制单元与列车各子系统通信,可以采集列车运行时各子系统的数据,并将相应的控制指令发送到各子系统,以便对列车各设备实施列车级控制。VCU可选用高性能的列车专用PLC来实现。列车上的两台VCU分为强主VCU和弱主VCU,两个VCU互为冗余。在强主VCU工作时,弱主VCU一直处于侦听状态,同时也可接收网络上传送的任何数据,但不行使网络管理和控制功能。只有当强主VCU发生故障时,弱主VCU将马上自动接替强主VCU工作,从而保证列车的正常运行。
2.3 配置过程
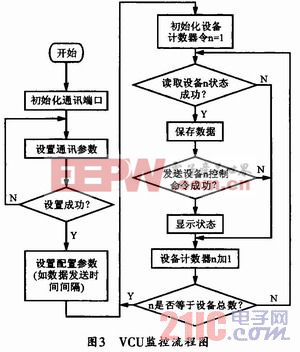
本设计在CANopen通信网络的基础上,以牵引系统为例来设计牵引系统与控制单元之间的通信网络接口,然后由列车主控制器VCU完成监测过程中数据的处理和虚拟仪器的工作。图3所示是由VCU完成监测控制的程序流程图。
当系统进行完网络管理状态转换之后,即可对控制系统节点启动配置过程,具体步骤是在DCU不在线时,由VCU通过SDO周期性询问DCU
是否在线;如果DCU已经连接到CAN总线上,则由DCU响应VCU的SDO请求;之后,再由VCU配置DCU的Rx PDO和Tx PDO,对象为14xxh和18xxh;之后由VCU配置DCU的消费者心跳,对象为1016h;同时由VCU配置DCU的生产者心跳,对象为1017h;最后,由VCU启动DCU系统。此时,DCU系统将处于预操作模式,之后,DCU系统将进入操作阶段,这时,PDO就能够进行交换了。
在CANopen网络对牵引的控制过程中,其传输的数据类型有过程数据(PDO)、服务数据(SDO)、网络管理数据(NMT)、时间戳(TimeStamp)和心跳数据(Heart-Beat)。其中过程数据用于传输DCU状态数据、故障数据、控制指令等;服务数据指的是DCU系统所提供的一个SDO信道,这个信道用于网络配置;网络管理表示VCU使用NMT对象来管理和控制DCU通信;时间戳的作用主要是为了同步,通常VCU会周期性地广播一个标准的时间戳到DCU,以便使DCU实时时钟与VCU同步;此外,系统中的DCU也将周期性地产生一个心跳信息,这样,VCU就可以通过检测DCU心跳信息来了解其状态;反之亦然。
3 结束语
利用CANopen总线网络拓扑结构能很好地连接城市轨道列车的各个数据模块。另外,CANopen总线强大的数据传输能力,也可以让列车通信模块变得容易扩充。应当说明的是,CANopen总线协议的接口配置对不同的应用系统各有不同,而不同的配置也会影响通信速率,因此,只有合理配置,才能保证整个列车通信系统的正常工作。
地铁 数据通信 设计 城市 协议 CANopen 总线 基于 相关文章:
- 地铁信号系统频段选择建议(10-06)
- 地铁信号系统频段选择(10-28)
- 地铁交通安防视频监控系统的方案设计(09-02)
- 无线手持PDA在地铁智能化管理方案的应用(09-16)
- 地铁列车乘客紧急报警系统设计(06-24)
- TETRA系统在地铁中的应用设计(06-13)