具有自动增益控制的射频振荡器稳定性分析
摘要:设计了一个具有自动增益控制(AGC)的电路来稳定射频功率振荡器的输出幅度,然而在加入AGC负反馈环路之后,该环路可能会产生自激振荡,使得振荡器输出的幅度更加不稳定。通过对整个电路系统传递函数的分析,采用调节反馈电路中三极管发射极电阻阻值的方法,使该电路工作在稳定的状态,进而达到稳定振荡器输出幅度的目的。
关键词:振荡器;射频;自动增益控制;传递函数;稳定性
稳定的振荡幅度是振荡器应用的非常关键的指标,幅度稳定技术往往都是高性能振荡器需要采用的技术,该技术在电子对抗、雷达、制导、卫星跟踪、宇宙通信及时间与频率计量等领域中的应用尤其重要。目前国内外已有一些相关的技术用于实现振荡幅度的自动控制,一般所采用的方法是:通过比较器鉴别振荡幅度超过一定值的点并通过运算放大器等电路处理将超过的量转化为对应的控制信号来调整振荡幅度,或者是采用模数转换器(ADC)和数模转换器(DAC)来跟踪振荡输出信号幅度的大小并生成对应模拟量控制振荡器偏流来调节输出幅度。这些方法的基本思想都是通过一个负反馈电路,将振荡器的输出幅度信息转变为与振荡幅度成比例的控制量,来控制振荡器的输出幅度,然而加入负反馈电路之后,反馈环路很可能发生自激振荡,从而影响输出幅度,使得振荡器输出的幅度更加不稳定,无法达到稳定幅度的目的。这就要求对整个电路系统做稳定性分析。
本文设计了一个具有自动增益控制的电路来稳定射频功率振荡器的输出幅度,通过对整个设计电路的传递函数分析,来避免反馈环路产生振荡,使整个电路工作在稳定的状态。
1 主体电路的设计
系统原理框图如图1所示,AGC环路由峰值检测器,低通滤波器,比较器以及控制信号产生器组成。振荡器的输出幅度被峰值检测器检测出后经过低通滤波与参考电平进行比较后产生控制信号,通过控制振荡器中功率MOSFET的栅源电压来使得输出的幅度稳定。

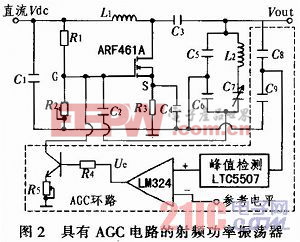
设计了一个频率为13.56 MHz,输出功率为100 W,谐振阻抗50 Ω,品质因数Q=5的具有稳幅功能的射频功率振荡器,图2为详细的电路设计,本设计采用克拉泼(Clapp)振荡器结构,功率MOSFET选取ARF461A,通过对静态工作点的设置,使振荡器的工作状态由起振时的AB类状态滑到稳定时的C类放大状态。输出的信号通过C8,C9分压,送入LTC5507进行峰值检测,检测后的峰值信号经运放LM324与参考电压进行比较后产生控制电压,控制电压经过放大后通过对三极管的控制,来调整振荡幅度的变化。振荡器幅度增大时,G点电压将会下降,ARF461A的栅源电压将会降低,进而调整输出幅度,使其输出减小。同理,当幅度减小时,ARF461A的栅源电压会升高,输出幅度将会增加。
2 系统稳定性分析
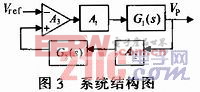
系统结构图如图3所示,A1为控制电压与漏极电流基波分量之间的传递函数,G1(s)为漏极电流基波分量与输出幅度的传递函数,A2为分压系数等于1/50,G2(s)为峰值检测电路的传递函数,A3为运放的放大倍数等于6。
2.1 射频功率振荡器电路的传递函数
如图2所示,设反馈回来的控制电压为Ue,通过作用于三极管,来改变ARF461A的栅源电压,进而改变漏极电流基波分量的大小。首先写出Ue和基波分量Il的关系。运用折线分析法,功率管的漏极电流为:
其次,要写出漏极基波电流分量Il与输出幅度的传递函数,如图4所示。
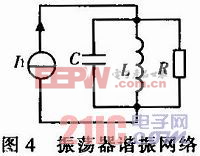

式(10)说明,u(t)由角频率为ω0的等幅正弦函数和频率为ωd的衰减正弦函数合成,两个频率ω0和ωd形成拍频,输出电压的幅度随时间的变化是一个二阶系统的阶跃响应,对应的特征根为 ,如果只考虑输出电压的幅度,不关心高频成分的细节,忽略高频成分和(ω0-ωd)的谐波分量,设幅度关于时间t的函数为Up(t),其拉普拉斯变换为:
,如果只考虑输出电压的幅度,不关心高频成分的细节,忽略高频成分和(ω0-ωd)的谐波分量,设幅度关于时间t的函数为Up(t),其拉普拉斯变换为:
2.2 峰值检测电路的传递函数
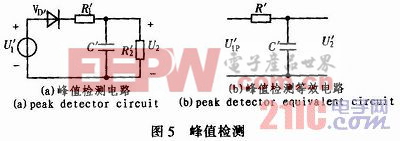
峰值检测电路等效成一个二极管和电容器电路,如图5(a)所示。当U1'>U2'时,VD’导通,反则截止。C’两端的电压U2’由 决定,而
决定,而 ,假设R1'R2',在平衡状态下二极管导通角为θD,iR1’在一个周期内的平均值为:
,假设R1'R2',在平衡状态下二极管导通角为θD,iR1’在一个周期内的平均值为:
2.3 电路系统的传递函数
系统的闭环传递函数可写成:
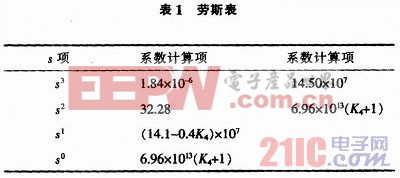
根据系统的传递函数,写出闭环特征方程后经整理带入具体的元器件值:R=50Ω,C=1.2 nF,R1’=200Ω,C’=1nF,θD=20,通过闭环特征方程各项的系数运用劳斯判据来判断系统是否稳定。劳斯表如表1所示,要使系统稳定,(14.1-0.4K4)×107>0,即K4=(-A1)A2A3R35.25,可解出,AGC环路中三极管射级电阻R5>1.02kΩ时,系统处于稳定状态。
运用Pspice仿真软件对系统电路进行仿真。仿真时,当R5>1.8kΩ时系统处于稳定状态,这与理论计算值存在一些偏差,该偏差是可以接受的,产生偏差的原因可能是在推导传递函数时忽略了一些高频成分和谐波分量。图6为R5=2kΩ时系统稳定时的输出波形,输出幅度稳定,其结果符合设计要求。图7为R5=1kΩ时的输出波形,此时系统不稳定,环路产生振荡,影响了输出幅度。
- 频谱分析仪测量谐波(02-25)
- 利用中频压控振荡器实现车载免提通话(07-04)
- 如何测量随偏压变化的MLCC电容(05-22)
- 浅析振荡器与谐振器(07-26)
- 电路中的晶振和匹配电容的总结(11-07)
- 最简单无线发射接收电路设计与详解(08-13)