基于RFID电子标签的宠物管理系统设计
RFID宠物管理系统通过给宠物植入电子芯片,给宠物办理电子身份证,把宠物信息记录入库,集中化管理。从根本上解决宠物信息收集难、管理难的问题。RFID宠物管理系统使用自行设计的手持机读写器,采用基于Web的B/S模式结合WebSevice、SSL、动态缓存、负载均衡、集群和ActiveX控件技术,使得系统扩展性好、安全性能高;用户使用方便、操作灵活,可大大提高宠物管理的工作效率。
1 RFID技术
RFID(Radio Frequency Identification)技术是一项利用射频信号通过空间耦合(交变磁场或电磁场)实现无接触式信息传递并通过所传递的信息达到自动识别的技术。20世纪90年代以来,RFID技术迅速发展,因其具有数据存储量大、穿透力强、读写距离远、读取速率快、使用寿命长、环境适应性好等特点,已被广泛应用于身份识别、物流管理、物品追踪、防伪、交通、动物管理等诸多领域。
一个完整的RFID系统主要由限量的后台计算机、若干读写器、阅读器及电子标签组成。其中电子标签是物品识别的载体,每个标签具有惟一的电子编码,其内部存放着物品的相关信息;读写器和阅读器是系统的中间设备,它们通过射频信息同电子标签进行近距离通信,从而识别标签指代的物品信息,通过接口把信息汇总给后台计算机。读写器和阅读器的区别在于,读写器可以对标签进行读写操作,而阅读器只能读取标签内部存放的信息;后台计算机分析从中间设备传来的信息,负责管理整个标签系统的正常工作。
RFID系统的硬件组成包括电子标签和电子标签读写器2部分。读写器通过射频信息同电子标签进行通信,系统通过读写器给电子标签发送指令,并通过读写器分析电子标签返回的有关信息;电子标签是应答器,用来响应读写器的指令,并报告处理结果。
电子标签由标签天线和标签芯片组成,标签天线是读写器和标签芯片之间进行信号和能量传递的终结。标签芯片则根据读写器的指令,做出相应的操作和响应。
2 系统结构及简介
2.1 系统结构
整个系统由软件和硬件两部分组成,硬件部分主要包括:RFID射频识别宠物芯片,手持式阅读器XC-2201系列,该系列读写器是针对我国养犬管理现状及需求,特别设计开发的综合手持终端。使用方便,具有执法人员需要的各种功能。信息实时上传,做到实时监控。信息传输加密,有效保护市民隐私。软件部分又分为宠物管理系统和移动宠物管理系统,宠物管理系统集成了管理、宠物信息注册、宠物办证、宠物信息查询等模块,移动宠物管理系统主要是为方便外出执法人员而特别开发的一款运行于移动设备、PDA等上系统管理软件,宠物移动管理软件主要模块有宠物信息查询、宠物数据同步等功能。系统结构图如图1所示。
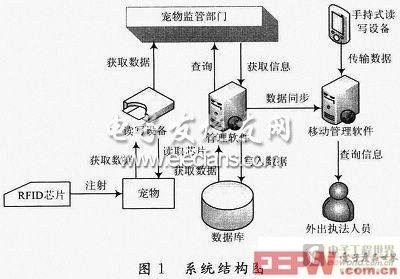
从图1中可以看出,通过宠物信息的注册或者宠物办证流程就把宠物信息录入数据库,其中除了宠物基本信息外,还包括宠物饲主信息、宠物免疫信息、宠物年检费缴纳信息等一并录入数据库。当外出执法人员外出执法是就可以通过装有移动宠物系统的移动终端,实时的查询宠物信息,移动宠物系统的数据直接来源于宠物管理系统,数据的同步过程也是非常的方便,移动终端通过自带的数据线连接任何一台可以接入Internet的电脑,同Web页面操作即可轻松实现数据的同步,当然根据不同的情况也可实现Wi-Fi等无线访问的功能。
2.2 数据库设计
系统管理模块有主要是用于给系统自定义拥有各个级别权限的用户,通过对用户权限的管理可以实现不同用户对应系统不同的操作权限,使整个执法部分各单位各人员各司其职,而整个系统的数据始终保持一致。该模块对应有用户表、角色表、权限表及用户角色对应表。主表为用户表,定义如图2所示。

系统管理模块同时也提供数据同步和数据备份、还原功能。系统备份、还原是用户通过Web操作轻松实现数据的备份和还原,除去了复杂的数据库操作。数据同步用来保证宠物移动管理系统数据和宠物管理移动数据的一致性,宠物移动管理系统采用C#语言开发,运行于Windows CE系统上,目前大多数的移动设备都采用了windows CE系统,这就使得宠物移动管理系统能适用于目前大多数的移动设备。通过对Active-Sync同步软件的二次开发,封装成ActiveX控件的的形式嵌入Web网页,而使得数据同步更人性化,更易于操作,使用人员只需在页面轻松的点击按钮即可实现数据的同步。目前这套宠物移动管理系统的使用还需配合手持式读写设备,两者之间通过蓝牙建立数据传输通道,当手持式读写器读到宠物芯片数据后,移动宠物管理系统通过蓝牙得到的数据而实现宠物信息的查询,当然根据需要是可以实现移动宠物管理系统和手持式读
- RFID电子标签的物联网物流管理系统(05-05)
- 利用RFID技术的动物跟踪(04-16)
- 基于Zigbee技术家用无线网络的构架(12-14)
- 无线通信领域中的模拟技术发展趋势(蜂窝基站)(09-22)
- 新一代移动通信系统及无线传输关键技术(06-19)
- 蜂窝移动通信基站电磁辐射对人体影响的探讨(04-10)