基于SAR系统的无人机定位导航系统的设计
引言
无人飞机与载人飞机相比,它具有体积小、造价低、使用方便、对作战环境要求低、战场生存能力较强等优点,备受世界各国军队的青睐。无人驾驶飞机以其准确、高效和灵便的侦察、干扰、欺骗、搜索、校射及在非正规条件下作战等多种作战能力,发挥着显着的作用,并引发了层出不穷的军事学术、装备技术等相关问题的研究。
高空长航时无人机的飞行高度利于观测星体,为此,考虑在惯性/SAR 组合基础上,采用惯性导航和星光组合,可以为SAR 成像提供高精度的姿态信息,提高SAR 成像质量。
本文以长航高空无人机成像期间对导航高精度要求为应用背景,开展了基于SAR 辅助的惯导/星光组合导航研究,结合SAR 工作的非连续特性,设计了SAR/惯导/星光组合导航定位方案,提出了非同步输出多传感器异步集中卡尔曼滤波算法,可有效提高导航定位系统的自主性和精度。
1 卡尔曼滤波器设计
设位移 s 时,飞机的位置坐标为X (s),对于不同的位移值,均有一个X (s)值与之对应,当取样位移不间断变化时,就得到位置坐标序列{X (s),X(s+1)……},飞机位置预测序列{X (s+1),X(s+2)……},该序列是系统噪声等驱动的一阶递归模型,在x 轴方向推导状态方程如下:

测量方程如下:

Zx (s)为s位移时飞机坐标x轴向的测量值。
H 为测量参数,它是由测量系统和测量方法所确定,不随位移变化的一个常数,因为是单模型,取为1,V(s)为测量噪声。
均方估计误差为Px (s+1) = E[Xx (s +1) — Xx (s)]2,在均方估计误差为最小的准则下,通过数学推导,即可得出飞机自动控制的卡尔曼滤波公式,如下:
预估计方程:

计算卡尔曼滤波增益,得:

均方预测误差方程:

同理,可以推导y,z 轴向的状态方程,则飞机位置的状态方程如下:
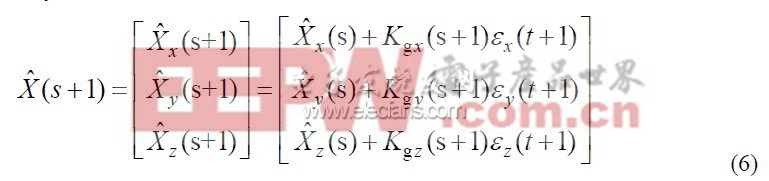
卡尔曼滤波是以预测加修正来实现滤波递推的,其这个性质,很容易通过计算机仿真实现,从而可以完成对飞机位置的预测,预估计方程:

同时,与地面基站雷达测量值进行比对,调飞机因为机械振动等原因造成的位移偏差,其滤波模型为:
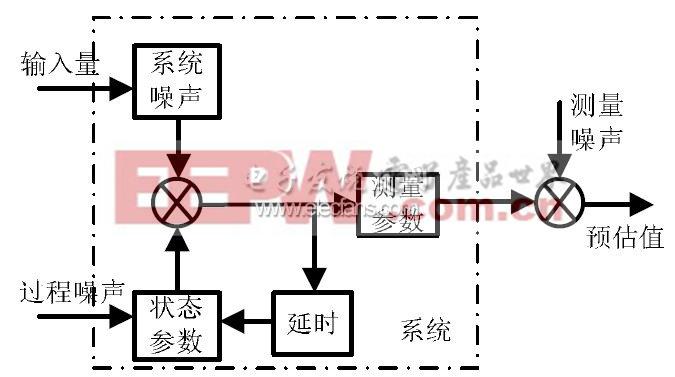
图 1 卡尔曼滤波的系统模型框图
2 SAR 辅助的惯导/星光组合导航系统
SAR 图像导航虽然具备较高的定位精度和自主性,但是其成像时仅能部分时段工作,而且对系统的姿态水平精度要求较高,而基于星敏感器的星光导航系统具有很高的姿态测定精度,因此,在采用惯导/星光姿态组合的同时,分时段地接入SAR 图像导航信号,能够保证系统具有较高的定位精度和定姿精度。考虑到SAR 图像导航仅能分时段工作,在实际应用过程中主要根据任务需要接入SAR 图像导航系统,本文设计了如图2 所示的基于SAR辅助的惯导/星光姿态组合导航系统。
将惯性导航系统与卫星定位、地理信息系统、里程仪组合构成的导航定位系统,既具有惯性导航的自主性、实时性又具有卫星定位系统的高精度、误差无积累等优点,有效地克服了惯性导航系统的累积误差和漂移误差,提高了系统的精度和可靠性。组合导航定位系统多用光学陀螺、机械陀螺和加速度表构成捷联式惯性导航,以地理信息匹配、卫星定位信息、里程计信息等为辅,惯导信息为主,采用卡尔曼滤波技术实现信息的最优综合以获得最佳的导航定位参数。
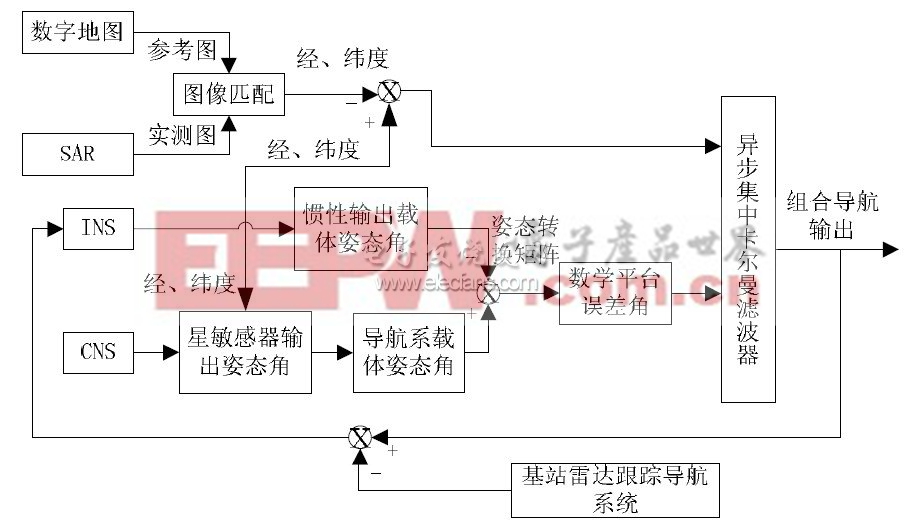
图2 基于SAR 辅助的惯导/星光组合导航系统
从图 1 可以看出:SAR 辅助的组合导航系统由按照任务需要可以灵活接入的SAR 图像导航、惯导/星光姿态组合导航部分和地面基站雷达跟踪系统三部分构成,激光陀螺捷联惯导组合最主要的特点是采用了激光陀螺技术,与机械陀螺相比,激光陀螺无需模数转换脉冲输出,是捷联式惯导系统的理想元件,而且构成捷联惯导系统的惯性敏感元件直接与载体相连,省去了结构复杂的机械平台,因而较机械惯导系统体积小、重量轻、可靠性高;此外激光陀螺捷联惯导组合还具有抗干扰能力强、启动时间短等技术特点,符合飞机快速飞行以及在强电磁干扰背景下精确定位的实际需求,在导航精度、环境适应能力、可靠性等方面可以很好地满足了使用要求。雷达跟踪系统导航输出通过无线模块发送给无人飞机,其信号与组合导航输出的信号构成反馈信号。系统综合运用激光陀螺捷联惯导、光学测距测角、卫星定位、无线通信、数字地图和地理信息处理,基站式雷达跟踪等多项技术,采用组合导航系统和自主式快速标定方法。
3 具体实现
飞机首先通过激光陀螺组合定位定向导航系统实现绝对位置、方向基准的建立和动态保持,并结合地面基站的雷达系统定位结果进行误差消除,具体实现过程描述如下:
(1)绝对位置和方向基准的确定:飞机处于停机状态,组合定位
- 第四代移动通信系统中的多天线技术(08-05)
- 透析信道效应对MIMO系统运作效能的影响(01-18)
- 如何发展中国第二代导航卫星系统(02-02)
- 北斗卫星导航系统的特点(02-02)
- 基于无线传送的智能家居室内通信系统(01-03)
- 基于WiMAX技术的5.8G无线专网射频系统设计(10-06)