基于多MCU的高频电刀研制
摘要:针对医用高频电刀系统结构较复杂,需要采集和控制的信息量大的难点,提出了一种基于多MCU结构的医用高频电刀设计及其与之配套的自动测试系统。主控制、射频控制、数据采集、用户界面分别采用独立的MCU控制。MCU之间分工协同工作,通过串行接口USART和SPI,并根据约定的通信协议进行通信;射频产生电路由负责射频控制的MCU控制复杂可编程逻辑器件(CPLD),从而产生控制功率驱动电路的方波。经测试,该系统输出频率稳定,系统参数灵活可调,且提高了高频电刀的实时性和安全性。
关键词:高频电刀;多MCU;USART;SPI;CPLD
0 引言
高频电刀是一种利用高频电压电流的热效应进行手术切割的电外科器械,一般具有电切和电凝的功能;相对于机械手术刀具有准确快捷、微创治疗的优点;其基本原理是通过在手术电极产生0.3~1 MHz频段内的高压射频信号对人体组织进行加热,从而实现组织切割和凝固。本文设计了一种基于多MCU结构的医用高频电刀,主要介绍系统的电路拓扑结构、各MCU的分工、MCU之间的通信方式和协议、射频产生电路、功率电路及其测试系统的设计。
1 高频电刀的工作原理和设计原则
1.1 高频电刀工作原理
因为生物组织是导电体,当有电流通过人体组织时,可同时产生热效应、电离效应和法拉第效应;低于100 kHz的交流电会产生有限的如肌肉痉挛、疼痛、心室纤维颤动等(法拉第效应);当电流频率达到100 kHz以上时,法拉第效应明显减少;当高于300 kHz时可忽略不计;而当频率达到1.5 MHz以上的电流通过人体时,对肌体的刺激作用已非常微弱,高频电流虽对人体已经没有刺激作用,但会使具有一定阻抗的人体组织产生热效应;高频电刀就是利用高频电流的只产生热效应而不产生电离和法拉第效应这一特性制成的。它将高频电流聚集于电刀电极的尖端,由于尖端与人体接触面积小、电流密度大,会产生较高能量如果电流是持续的高频电流,细胞受到的热量会逐渐增加,当热量达到一定程度时,接触处的细胞会受热破裂,细胞破裂后其水份成为水汽,带走细胞上的热量,利用手术电极上高密度的高频电流使人体组织切除或分开,这就是电切;如果电流是间断的高频电流,产生的热效应也是间断的,细胞内部水份得不到足够的高温,细胞就不会破裂,但会慢慢脱水,细胞就会干枯凝固,这就是电凝;电切和电凝是高频电刀的2种基本工作模式。
1.2 高频电刀的设计原则
从高频电刀的工作原理可知,其安全性至关重要。高频电刀的输出还应有频谱要求,在工作时要求输出高频电流的频谱越窄越好,最好是一单根谱线,故要求电刀输出波形为纯净的正弦波。另外,为在不同人体组织上得到好的作用效果,对输出功率要进行控制,并且在工作时应根据工作点人体电阻的变化输出不同的功率,即按照预定的功率输出曲线输出功率,好的电刀功率曲线宽而平坦,而差的电刀则是尖峰状功率曲线。
2 基于多MCU的系统设计
2.1 设计原理和电路拓扑图
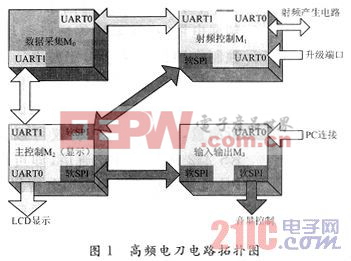
由于医用高频电刀的系统结构较复杂,需要采集和控制的信息量大,同时为了提高系统的安全性和实时性,本系统采用多MCU控制的设计。MCU选用基于RISC结构的8位低功耗AVR单片机ATmega128。其先进的指令集以及单周期指令执行时间可以缓减系统在功耗和处理速度之间的矛盾;而且具有包括USART、SPI串行通信接口以及8通道10位AD转换等在内的丰富外设。MCU之间分工协同工作,通过ATmega128自带的USA RT和SPI接口通信。各个MCU的连接拓扑图如图1所示,其中:负责数据采集和电刺激输出的MCU定义为M0,负责射频与控温的MCU定义为M1,负责显示界面与整体控制的MCU定义为M2,负责用户输入和PC通信的MCU定义为M3。基于多MCU的设计使数据采集、射频控制、人机界面分开,保证了高频电刀控制的安全性和实时性,并且人机交互更加顺畅。
2.2 通信方式和协议
本系统采用多MCU分工协同工作,工作过程中MCU之间需要实时和大量的数据传输。本系统的通信是基于串行通信SPI和USART的。SPI接口是Motorola首先提出的全双工三线同步串行外围接口,采用主从模式(Master Slave)架构。UART定义了数据传输过程中如何打包解包以及如何做可靠性处理,属于通信协议层,可以实现全双工传输和接收;包括了RS 232,RS 423,RS 422和RS 485等接口标准规范和总线规范。 SPI和USART都可以实现全双工通信。
在本系统中,UART通信使用RS 232接口标准,与TTL电平相比,可以有效地增加通信距离。握手方式采用硬件握手,DTR/DSR用于表示系统通信就绪,而RTS/CTS用于单个数据包的传输。M0使用2个UART异步串行口,均带有DTS(输入)和DTR(输出)检测。M1使用2个均带有DTS和DTR的异步串行口,另加一个SPI同步串行口。M2使用一个UART口与M0进行通信,当显示设备为LCD屏时,使用第2个UART口;另外,M2使用固定的软SPI口与M3进行通信。M3使用2个UART串行口与外部进行通信,使用一个软SPI口与M2进行通信,另外加一个软SPI口进行声音控制,阻抗不同则声音的频率不同,医生通过声音即可判断电极进入组织的深度。定义所有的异步串行口均为:8位数据位,无校验位,1位停止位。系统各MCU之间通信机制如下:
握手过程:
(1)开机,M0~M3均进行自检,MCU板子获取数据后,进入等待模式;
(2)M2进入初界面后,对每个MCU依次发送获取软件版本的命令,如果每个MCU都在1 s时间内返回回应帧则认为连接无问题,自检通过;
(3)M2向M0获取各种电极信息,存入全局变量中,握手成功。
通信过程:
(1)定义M2任何时候均为主机,相对于M2,M0、M1和M3均为从机。发送查询桢后,从机均以中断方式返回查询数据,主机应检验该数据桢是否为所需要的,数据是否正确;
(2)M0和M1之间,M1是主机,M0是从机,以中断方式响应。
3 射频产生电路的设计
3.1 高频信号的产生
高频信号的产生方法有多种,以往的高频电刀设计多是采用单片机直接产生或者利用脉宽调制器芯片控制功率驱动电路的PWM脉冲;而单片机产生的脉冲信号源由于是靠软件实现的,所以输出频率及步进受单片机时钟频率、指令数和指令执行周期的限制。本系统是由负责射频控制的MCU(M1)控制复杂可编程逻辑器件(CPLD),从而产生控制功率驱动电路的方波。CPLD通过对晶振频率分频产生485 kHz的方波,驱动后续的功率电路。脉冲信号源的参数(频率、占空比)由负责射频控制的MCU设置,并通过SPI接口与CPLD通信,将波形参数发送到CPLD。本设计主要特点有:
(1)波形信号精度高、分辨率高、稳定性好,系统频率不会随工作时间出现漂移;
(2)波形的占空比等参数易于设置,从而可以灵活地控制和调节射频输出功率,以选择最佳的功率参数。
3.2 阻抗匹配网络和选频电路
射频功率放大电路要对CPLD产生的485 kHz方波进行放大,经阻抗变换和滤波电路将正弦波耦合到电极上。CPLD输出的方波首先要驱动功率MOS管,这样就实现了高频信号对直流电压的控制,即功率放大。此时经过放大的脉冲信号不是手术所需的高频高压电流,还要经过阻抗匹配和选频滤波才能形成手术所需的正弦波。由矩形脉冲信号的傅里叶分析可知,脉冲宽度为τ,幅度为E,重复周期为T1的矩形脉冲信号的基波幅度a1=(2E/π)sin(τ/T1π),频带宽度B=2π/τ;因此通过改变CPLD产生方波的占空比,可以灵活的选择最佳输出功率和选频网络的参数。
3.3 基于电源管理芯片的射频功率电源设计
针对高频电刀不同的工作模式需要不同的射频电路功率电压,设计了可由MCU控制的可调功率电压输出。以高频电刀使用电凝功能时为例,设计要求为:输入为37 V时,通过调整控制端,要求输出可以为13 V,17 V,21 V,25 V,29 V,最大电流为2.5 A。应用电路如图2所示。
- 某型导引头小型化频率综合器的研制(08-16)
- 一种基于自组网络的无线抄表系统研制(04-17)
- 恒流多通道动物机器人遥控刺激系统的研制(05-11)
- 高频无线电系统的组成(06-09)
- 高频开关电源在微波站的应用[图](12-15)
- 短距离无线通讯技术的汽车RFID系统(01-24)