使用GPS传感器的飞行器自动抛物系统设计
时间:07-23
来源:电子产品世界
点击:
摘要:本文针对飞行器空投物资难以实现精准着陆的问题,推导了飞行器空中抛物的算法公式,在此基础上利用ADuC7026单片机对GPS数字传感器和MEMS陀螺仪提供的导航信息进行精确运算处理,确定了自动抛物时机,实现对目标位置进行准确抛物的控制,并通过实验验证了设计的有效性。
引言
现代飞行器在社会各领域都有广泛的应用,其中利用飞行器进行物资的运输投放也颇为常见。例如,在发生重大自然灾害时,由于路面交通的损坏,将使得空中运输成为受灾区域各物资来源的唯一途径。以往飞行员在投放物资时,往往根据经验通过目测来确定投放时机,但是这样往往会给地面人员的物资拾取带来很大的不便,尤其是在地理环境复杂的山区。GPS传感器是一种能够全天候、实时地提供载体位置信息的传感器,在很多领域均有广泛应用。若能利用GPS传感器采集详细的飞行器位置信息,并通过飞行器中央处理单元依据这些信息快速计算出抛物的准确时机,则可以有效地提高物资投放的准确性。此外,飞行器抛物系统在军事上也有广泛用途,如利用无人飞行器进行投弹等。
本设计将GPS数字传感器整合到小型无人飞行器上,经ADuC7026单片机精确运算处理后,对目标位置进行准确抛物。
总体方案设计及飞行抛物算法
总体设计
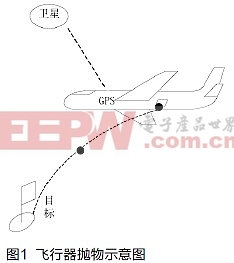
本文设计的飞行器抛物系统的抛物过程如图1所示,为了能精确地将物体投掷到目标点,必须在飞行器距离目标点一定距离时便提前开启抛物装置,使物体在空中以一定的初速度做自由落体运动直至到达目标点。

- 美国GPS系统的管理与运营(02-07)
- 基于GPS的数据采集系统的研究(01-15)
- 展频技术完美解决GPS搜星灵敏度难题(01-04)
- GPS的信噪比很高,为何定位时间却很长?(05-25)
- 从技术层面上分析北斗与GPS的九大区别(05-08)
- 北斗卫星导航试验系统(北斗一代)(02-04)