利用高亮度LED和SEPIC电源模块构建显示器背光方案
选择工作频率
开关频率的选择需要权衡最小电感、电容尺寸,并在较高开关频率时不会对Q1造成不合理的热应力要求。MAX16807数据资料给出了一个公式,利用定时电阻(R6)和定时电容(C7)确定开关频率。选择3kΩ电阻和1000pF电容,电源转换器将工作在500kHz标称频率,能够在尺寸和效率之间达到较好的均衡。
电流检测
MAX16807采用峰值电流控制模式,峰值电流模式中将开关电流的峰值与输出电压误差相比较,产生相应的脉冲占空比,控制输出电压。电流检测电路还提供过流保护。为了防止毛刺注入电路,采用由R7 (1kΩ)和C10 (100pF)构成的100ns滤波器,该滤波器足以消除电压毛刺,而且不会对电流波形有太大影响。
斜率补偿
对于电流模式控制器,当占空比高于50%时,会造成谐波不稳定。这是由于电流的上升(导通)斜率低于下降(关断)斜率,不稳定性表现为调节器为了获得正确的占空比,会在大/小占空比之间交替变化。不稳定性会导致电流、电压纹波增大,为了避免这一问题的出现,可以人为增大电流监测信号的斜率。
晶体管Q2的基极连接在RTCT引脚,该引脚的纹波电压通过驱动Q2进入D2和R8,在R7产生一个小电流,为电流检测信号提供一个斜率补偿。图3所示为斜率补偿信号、电流检测信号和二者求和的滤波信号。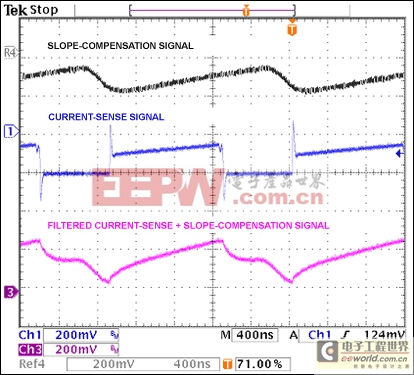
图3. 斜率补偿、电流检测以及二者求和后的滤波波形
分离电感与耦合线圈
SEPIC设计中需要确定使用两个分离电感还是一个耦合线圈,通常,使用一个耦合线圈要比使用两个电感价格便宜。另外,使用耦合线圈可以减小电流(是电感L1、L2的主要决定因素),从而减小电感量。
当然,与分离电感相比,耦合线圈的选择范围较窄。如果在多种应用中采用同一设计,最好选择分离电感,因为L1的平均电流在很大程度上取决于VIN和VLED,考虑到设计灵活性,可以选择分离电感。
线性HB LED电流驱动器
MAX16807具有8路线性HB LED电流驱动器:OUT0至OUT7。电阻R5用于设置每个驱动器的电流,每路驱动器的最大电流可达50mA。并联驱动器输出可以获得更大的HB LED驱动电流。该设计中将每路驱动器电流设置在37.5mA,四路驱动器并联后可以为每串HB LED提供150mA的电流。
可通过两种途径控制驱动器:一种是由/OE引脚控制驱动器的通、断,实现PWM亮度调节,这种方式为首选方案;另一种方式是通过SPI?接口分别控制每路驱动器的通、断。另一款类似IC (MAX16808)还可以通过SPI接口获悉驱动器是否发生故障。在图2所示结构中,施密特触发反相器(U2),通过CLK引脚将一串连续的“1”送入IC,开启输出。必要时,也可以通过J2连接SPI接口。
自适应反馈控制
利用同一电源,通过独立的线性驱动器分别驱动多串HB LED时,对于不同的SEPIC输出电压和不同的LED串导通电压,OUTx引脚的电压不同。由于IC内部HB LED驱动器的功耗是VOUTx之和乘以HB LED电流,由此可见,保持尽可能低的SEPIC电压(VLED)非常重要,同时还要保证足够高的导通电压,使OUTx引脚的电压略高于饱和电压(大约为1V)。自适应反馈电压通过或逻辑二极管选择较低的OUT电压作为稳压调节,电阻(R2)的压降使OUTx的电压保持在至少1V,从而满足上述设计要求。
设计中,U3的阳极电压等于两个OUT电压(OUT0至OUT3和OUT4至OUT7)中较低的一个,电流从VLED通过R1、R2、U3进入较低电压的OUT端。由于R1-R2节点电压与反馈电压(2.5V)相等,HB LED驱动器的电压为:
通过修正R2的数值,可以将VOUT电压稳定在最小值。另一串LED将具有较低的串联电压和较高的OUT电压。线性驱动器吸收对应的压差和功耗,由于这个原因,最好选择具有一致的正向导通电压的HB LED,正向导通电压的绝对值并不严格,但它们之间的差异应控制在200mV以内,具体取决于每串HB LED的个数。
另一个SEPIC设计电子表格有助于选择自适应控制元件。
PWM亮度调节
对于PWM亮度调节,MAX16807的/OE引脚输入为PWM反相信号,用于控制驱动器的通、断。通、断脉冲宽度即使低于1μs,也能保证正常工作。但是,当OUTx驱动器关闭时,自适应电压控制器检测的节点电压浮置在一个较高的电压,调节器在试图满足误差放大器输出要求的时候降低了VLED。因此,当PWM输入返回到高电平时,VLED的电压可能不足以驱动HB LED串,经过数十微秒后,SEPIC调节器补充所需电压,但对短脉冲(低占空比)应用意义不大。
图2所示的设计利用PWM信号,通过R12和D3拉低节点电压,从而解决了上述问题。电源在电压高于任何预期的工作电压时进入“静止”模式。对于短脉冲,额外的电压增大了瞬时功率,但极低的占空比可以忽略这一损耗。占空比大于3%时,VLED进入自适应电压控制。图4中,输出电压从大约21.1V的“静止”电压(PWM处于“关闭”状态)变化到大约15.8V的自适应电压(PWM处于“导通”状态)。从图5可以看出,占空比为3%时,VLED在返回到静止电压之前刚好达到自适应电压。图6中,“导通”脉冲的宽度只有1μs,VLED不会从静止电压发生变化。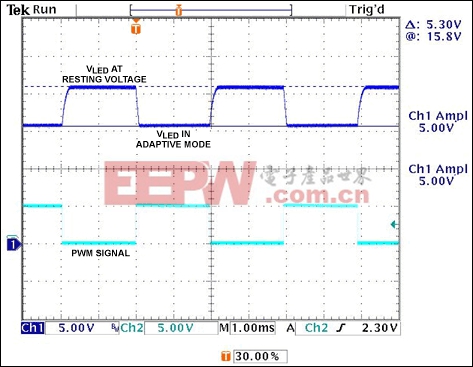
图4. 50% PWM信号下的VLED响应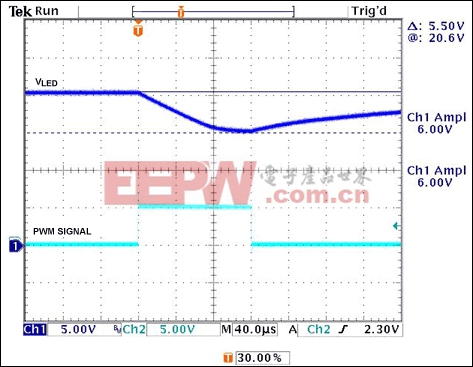
图5. 3% PWM信号下的VLED响应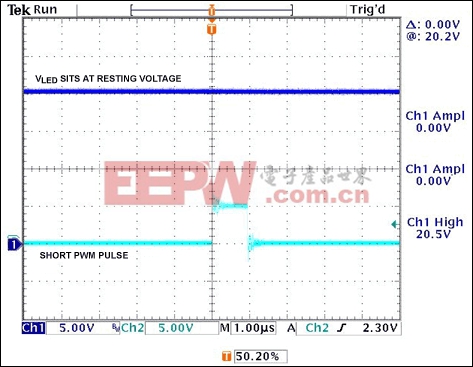
图6. 1μs PWM信号下的VLED响应
模拟电路 模拟芯片 德州仪器 放大器 ADI 模拟电子 相关文章:
- 12位串行A/D转换器MAX187的应用(10-06)
- AGC中频放大器设计(下)(10-07)
- 低功耗、3V工作电压、精度0.05% 的A/D变换器(10-09)
- PIC16C5X单片机睡眠状态的键唤醒方法(11-16)
- 用简化方法对高可用性系统中的电源进行数字化管理(10-02)
- 利用GM6801实现智能快速充电器设计(11-20)