智能化交流接触器研究
直流吸持的方法。从20 世纪70 年代开始,我国的电器工作者就开始了混合式交流接触器的研究工作。在起动过程中,首先由触发电路对晶闸管发出触发信号,导通晶闸管,再选一个合适的相角接通触发器主触头,即先接通晶闸管回路,后接通接触器触头。在闭合工作状态时,主电路电流经过交流接触器的主触头,此时晶闸管截止;当需要接触器产生分断动作时,导通晶闸管,使电路中的电流转入晶闸管,即先分断接触器主触头,再分断晶闸管回路,实现无弧分断。
在交流接触器的每相触头上仅并联一个单向晶闸管,不仅实现了无弧接通、分断,而且实现了节能、节材、无声运行以及与主控计算机的双向通信, 也以磁保持继电器为基础,设计了一款性价比高、使用简便、性能指标优良的智能无弧交流接触器。
4 智能型交流接触器
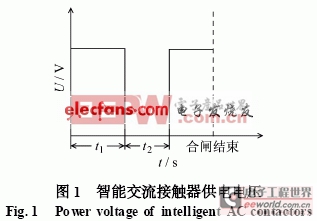
2000 年提出了一种交流接触器的电子操作方案,其原理是对接触器线圈用直流励磁,并在电磁铁动作过程中,把励磁周期分成2 段,其中T1 为通电阶段, T2 为停歇阶段(见图1) 。通过改变停歇时间T2 可以改变电磁铁动铁芯的闭合速度,并达到减小触头振动的目的。这就是智能型交流接触器的雏形。
智能交流接触器采用的是直流起动、直流吸持的工作状态,在吸合过程中通过全波整流电路将交流电源变为脉动的直流电源,提供接触器吸合磁势,使接触器完成吸合工作 。智能交流接触器一般都具有下列显著特点中的一个或几个: ① 实现了三相电路的零电流分断控制,无弧或少弧分断,接触器电寿命大大提高; ②通过单片机程序控制,对应不同电源电压,接触器可以选择相应的最佳合闸相角,具有选相合闸功能; ③通过单片机程序使接触器在直流高电压大电流情况起动,直流低电压小电流吸持,实现节能无声运行; ④ 具有与主控计算机进行双向通信的通信功能; ⑤电寿命、操作频率大大提高,工作的可靠性得到进一步改善。
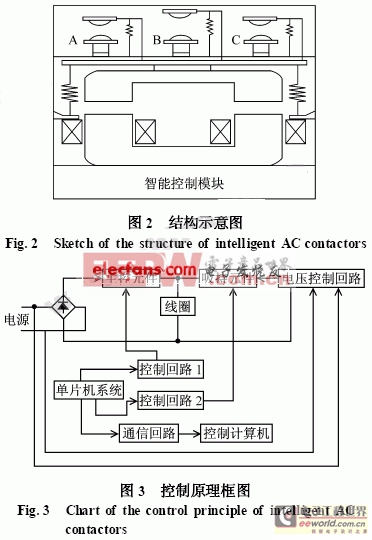
智能交流接触器是在开关本体上,加装了智能控制模块,实现起动、吸合、分断全过程的优化控制,并具有通信功能。图2 给出了智能交流接触器的结构示意图,图3 给出了智能交流接触器的控制原理框图。
在起动过程中,单片机对电源电压进行实时采样,若电源电压超过最低吸合电压,单片机系统根据电压值按照相应的程序控制可控元件定相、定时工作,保证接触器处于最佳起动状态。在吸持状态,由低电压直流吸持电路提供该电器的吸持能量实现节能无声运行。一旦接到分断信号,单片机系统通过电流互感器对主电路电流进行采样,从而进入三相电路的零电流分断控制程序,实现分断控制。
4. 1 电磁机构动态分析以及吸合过程动态控制
电磁机构是接触器的感测部分,在接触器中占有重要位置。根据智能交流接触器的工作特点,对其电磁机构的动态过程进行动态分析 ,提出智能交流接触器吸合过程动态控制的概念 。该概念是应用智能控制系统按不同电源电压(激磁电压) 调节控制参数,如合闸相位角、吸合过程强激磁的接通和断开时间等,由此改变铁心在吸合过程中的运动速度,减少铁心撞击,消除接触器的主触头在吸合过程中的1 、2 次弹跳,从而减少触头磨损,提高各项性能指标,并节约能量。为了达到减少动、静铁心在闭合瞬间的撞击速度,消除触头弹跳的目的,智能交流接触器吸合过程动态控制概念的内容之一是通过以单片机为核心的智能控制系统,调节强激磁控制元件的导通和截止时间,从而改变吸合过程,实现不同的强激磁控制方案。强激磁控制方案有不分段控制方案与分段控制方案2 种。
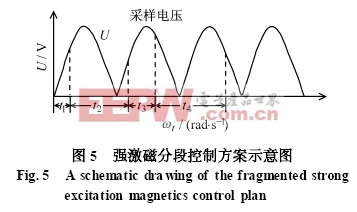
图4 为强激磁不分段控制方案 。图中t1 为智能控制系统检测到采样电压零点以后延时的时间( t1 处即合闸相角) , t2 为强激磁时间。在确定接触器可靠闭合后,将强激磁关断,只留下吸持电压维持接触器正常工作。由于确定完全吸合后才关断强激磁信号,所以随着铁心行程的增大以及速度的增加,难以大幅度减少动、静铁心之间的碰撞和消除在吸合过程中动静触头之间的弹跳。
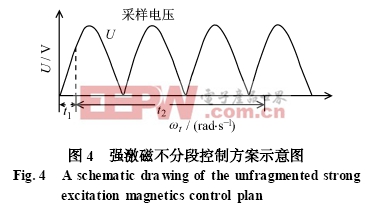
图5 为强激磁分段控制方案 。图中t1 为合闸时刻(选定的合闸相角) ; t2 为强激磁回路导通的时间; t3 为关断强激磁的时间; t4 为重新触发强激磁回路导通的时间。再次关断强激磁控制回路,使接触器铁心依靠惯性完成吸合任务,实现吸合过程的“软着陆”,将铁心之间的撞击能量降到最小,触头之间的1 、2 次弹跳大大减少甚至完全消除。实验表明,采用上述控制方案后,在不同的电网电压下吸合过程的动态吸力特性都可以和接触器的反力特性很好地配合,能明显减少触头振动,提高接触器的机械寿命和电寿命;在运行过程中采用智能控制可以减少接触器所消耗的功率, 大幅度节能。
4. 2 零电流分断控制技术
零电流分断控制技术即电流零点分断控制技术,是智
模拟电源 电源管理 模拟器件 模拟电子 模拟 模拟电路 模拟芯片 德州仪器 放大器 ADI 相关文章:
- 采用数字电源还是模拟电源?(01-17)
- 模拟电源管理与数字电源管理(02-05)
- 数字电源正在超越模拟电源(03-19)
- 数字电源PK模拟电源(04-03)
- TI工程师现身说法:采用数字电源还是模拟电源?(10-10)
- 开关电源与模拟电源的分别(05-08)