MAX9949/MAX9950参数测量单元PMU工作模式
概述
MAX9949/MAX9950是双通道参数测量单元(PMU),具有四种主要工作模式:
- FIMI—加流/测流
- FIMV—加流/测压
- FVMI—加压/测流
- FVMV—加压/测压
本文没有讨论两种辅助操作模式,即:无加载信号/测压(FNMV)和无加载信号/测流(FNMI)。关于这两种模式的详细信息,请参照数据资料。
这篇应用笔记分章节讨论四种主要工作模式,每个章节根据等效框图说明芯片的功能。利用公式解释工作原理,并给出了配置实例。针对FIMI模式的表格给出了进一步的设计案例,MAX9949/MAX9950针对不同类型的ADC与MSR引脚连接进行配置。用户可以参考这些实例、配置、公式和表格,设置特殊的工作模式。
如需了解如何通过串口配置各种模式,请参照数据资料。
注意事项及附加说明
给出原理框图之前,首先提供以下附加说明。
- 本应用笔记的内容是对数据资料的补充,建议读者首先获取一份数据资料,确保所有设置都符合数据资料的规定。
- 本文所举示例假设PMU都已经过校准。为简化问题,假设所有失调为零。没有失调的器件在现实生活中并不存在,所有器件在实际使用之前都需要进行校准,以达到绝对精度要求。
- 数据资料中的满量程范围(FSR)指从负向最小值到正向最大值的范围。比如,200μA的FSR范围为±200μA,共计400μA。其它量程±2μA、±2mA和±64mA同样如此换算。
- 线性误差表示为FSR的函数,通常在±0.02%范围内。如果我们选取2μA范围,则在整个4μA FSR范围内,最大线性误差为0.02% x 4μA = 80nA。
- 不要超过绝对最大额定值指标,确保工作在数据资料规定的标称范围内。超出标称工作范围可能导致异常结果或损坏器件。
- 框图中椭圆内的数字代表节点电压,用户可以自行验证各节点值。框图采用理想运放的SPICE模型进行仿真,节点电压值即为仿真结果。
- 在FI (加流)模式下,电流正比于[VIN- VIOS]。
- 表中给出了如何针对单极性和双极性ADC设置IOS。
- 所有示例框图采用15.5kΩ负载,RSENSE= 10kΩ,量程设为200μA。框图适用于任何负载和任何量程。
- 本应用笔记也适用于MAX9951/MAX9952PMU,但有两点例外:反馈环路增益倍数是4而不是2;所使用的检测电阻值翻倍。
FIMI模式
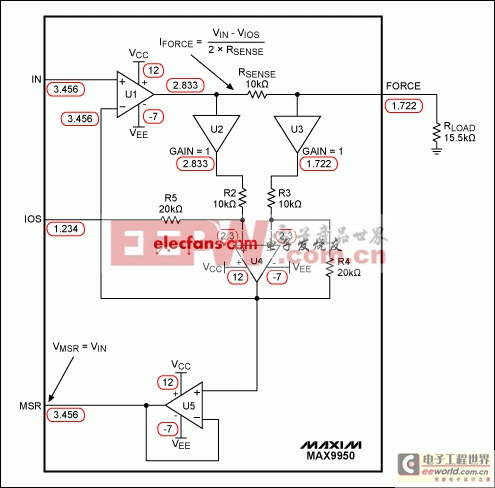
图1. 示例配置的FIMI模式等效框图
由图1可以观察到:
- MSR引脚监测IN输入电压,加上或减去U1、U2、U3、U4和U5的全部失调电压。MSR引脚自身并不直接检测输入电流,IFORCE电流正比于VIN- VIOS:
(式1) - 图1给出了一个设置案例,其中,IN = 3.456V,IOS = 1.234V,负载为15.5kΩ。利用式1和RSENSE= 10kΩ (±200μA量程),得到IFORCE= 111.1μA。
- 通过计算流过RSENSE的电流可以确认IFORCE的计算:
负载端:IRSENSE= (2.833 - 1.722)/10,000 = 111.1μA (式2) IRLOAD= 1.722/15,500 = 111.0968μA (误差源于3位分辨率)
表1. FIMI配置示例,可在MSR引脚选择单极性或双极性输入ADC
FIMI IN
(V)IOS
(V)RSENSE
(Ω)FI
(μA)MSR
(V)IOS set for -4V to +4V ADC on MSR output -4 0 10,000 -200 -4 -3 0 10,000 -150 -3 -2 0 10,000 -100 -2 -1 0 10,000 -50 -1 0 0 10,000 0 0 1 0 10,000 50 1 2 0 10,000 100 2 3 0 10,000 150 3 4 0 10,000 200 4 IOS set for 0V to +8V ADC on MSR output 0 4 10,000 -200 0 1 4 10,000 -150 1 2 4 10,000 -100 2 3 4 10,000 -50 3 4 4 10,000 0 4 5 4 10,000 50 5 6 4 10,000 100 6 7 4 10,000 150 7 8 4 10,000 200 8 表1说明如何使用IOS引脚配置芯片,以支持单极性ADC (本例中,-4V至+4V)或双极性ADC (0V至8V)。由此,客户可以针对其应用需求在较宽范围选择ADC。表1示例采用200μA量程(RSENSE= 10kΩ),但相同的设置适用于所有量程。
FIMV模式
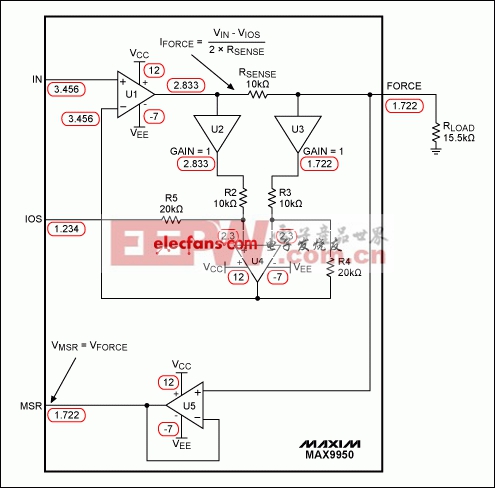
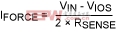
图2. 示例配置的FIMV模式等效框图
FIMV节点与FIMI模式基本相同,只是输出端或FORCE引脚电压由MSR引脚监测(图2)。FORCE引脚输出电流与图1完全相同,所有计算过程也相同。FVMI模式
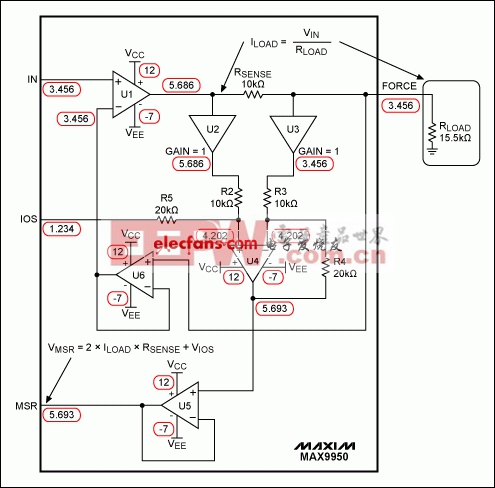
图3. 示例配置的FVMI模式等效框图
在FVMI模式下,FORCE引脚电压强制等于IN引脚电压(图3),因此,VFORCE= VIN。
从图3很容易看到这一点:ILOAD= VIN/RLOAD= 3.456/15,500 = 222.97μA (式3) 因为RSENSE= 10kΩ,量程为200μA。但我们超出200μA FSR量程22.97μA。考虑到每个设定量程都有一定裕量,超出FSR指标,所以这个结果是可接受的。MSR引脚通过IOS引脚电压偏置为:VMSR= 2 × (ILOAD× RSENSE) + VIOS。
FVMV模式

图4. 示例配置的FVMV模式等效框图
图4显示强制输出为IN电压,MSR引脚监控该电压或加压。因此,ILOAD= VIN/RLOAD。结论
本应用笔记在数据资料的基础上详细说明了MAX9949/MAX9950 PMU器件的四种主要工作模式,并给出了每种模式下的等效框图和设置示例,便于实际评估。
- 中国电源管理芯片市场解析(02-14)
- 安森美半导体汽车信息娱乐系统电源方案(05-18)
- 实现小巧可靠的低噪声电源解决方案(01-22)
- AMC1204应用指南(04-03)
- 空间受限应用的最高功率密度、多轨电源解决方案(08-12)
- 12位串行A/D转换器MAX187的应用(10-06)