自由度机器人关节间隙误差分析及仿真
1 系统介绍
深圳市众为兴数控技术有限公司自主研发设计的MR601机器人,是一款集工业教学应用于一体的MIN I型6自由度机器人,如图1所示,对应连杆坐标系见图2。


该机器人采用基于PC机的开放式控制系统,控制系统如下图3所示。
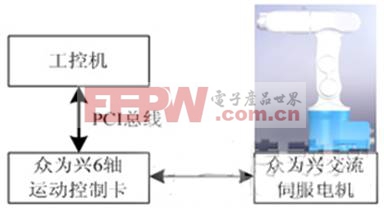
图3 MR601机器人控制系统架构
控制系统软件采用VC6.0开发,具有点位、空间直线、空间曲线运动功能,可以实现关节坐标编程和空间直角坐标编程,空间直角坐标与关节坐标相互转换。
2 轨迹试验
现让机器人绘制一正方形,以验证机器人整体性能。
机器人末端固定一黑色油性笔,工作平台上放置一白色带灰色条纹瓷砖,见下图4所示,以便于机器人在其上绘图。

图4 机器人轨迹试验图
机器人末端姿态采用ZYZ欧拉角表示,单位为度;坐标单位为毫米,在直角坐标空间对机器人末端执行器坐标设置如下:
第一点:坐标(350,0,5),姿态(0,180,0);
第二点:坐标(450,0,5),姿态(0,180,0);
第三点:坐标(450,100,5),姿态(0,180,0);
第四点:坐标(350,100,5),姿态(0,180,0);
第五点:坐标(350,0,5),姿态(0,180,0);
其中,第一点与第五点重合以保证绘制出一封闭正方形。
将直角空间坐标转换为关节空间坐标。机器人根据生成的关节坐标进行正方形绘制。各点位置以及绘制结果如下图5所示。
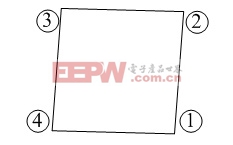
图5 机器人绘制轨迹图
结果显示,机器人所绘制轨迹为一平形四边形,存在以下问题:
(1) 第1点与实际点偏移2mm;
(2) 边12和边34与期望轨迹夹角为2度;
(3) 边23和边41与期望轨迹有近1度偏移;
(4) 轨迹线条不均匀。
3 误差分析
机器人的结构设计与装配对整体的性能影响很大,在对程序、电器部分排查后,将误差的原因锁定在结构部分。
机器人第一关节电机安装在基座上,其余5个关节电机安装在同一个方向,见图2坐标系X0Y0Z0中X0负向,重量集中在该方向。
用手晃动每个关节,发现第二关节(见图2 坐标系X2Y2Z2)存在关节间隙,该间隙主要是轴承轴向间隙引起。初步判断机器人轨迹偏移可能是由于第2个关节的间隙产生,机器人手臂重量导致手臂向间隙方向有一定角度的滚翻,即绕X0轴逆时针转动一微小角度。
4 建模仿真
现增加一虚拟关节,等效机械手臂的滚翻。虚拟关节轴线垂直于第2关节的轴线方向,建立图6所示的相关机器人坐标系。
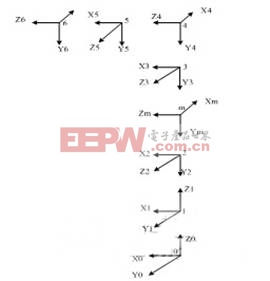
图6 增加虚拟关节机器人坐标系
其中:Z0为基座原点,坐标系X2Y2Z2为机器人第2关节坐标系,坐标系XmYmZm为增加的机器人虚拟关节坐标系,轴线Zm垂直于关节2轴线Z2。
根据图6的坐标系建立机器人空间运动方程。根据边线12和边线34的偏移角度,假定虚拟关节旋转2度,其状态在运动过程中不发生变化。进行MATLAB动态仿真,仿真结果如下图。
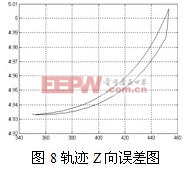
由图7的仿真图与图5的实际轨迹图对比可知,两者的轨迹走向基本一致;从图8的Z向误差图可以得知,机械间隙导致Z向有近0.1mm的变化。
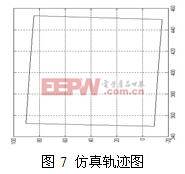
由仿真分析结果可以断定,轨迹偏移主要由第2关节的轴承间隙引起。
从直观角度分析:(1)关节间隙导致机器人手臂有一定范围的滚翻,翻滚角度不变,随着手臂的展开偏移误差不断增大,导致边线倾斜。(2)Z向误差导致笔尖上下移动,线条轨迹不均匀。
5 后记
本方法将关节间隙等效为一个旋转一定角度的虚拟关节,在定性分析的同时,得到关节间隙对机器人精度的量化误差。
根据建立的误差方程求解机器人的逆解,部分关节轨迹为复数解。说明通过算法对于该误差的补偿很有限,机器人整体机械结构是决定机器人精度的关键因素。
对第2关节的轴承进行调整,轨迹偏移问题得到解决,可以绘制出规则的图形。
- ADISl6300四自由度IMU在姿态测量中的应用(08-18)
- 设计自由度很大的二级直耦宽带放大器电路及其工作原理(10-16)
- ST推出6自由度的iNEMO传感器模块LSM330D(11-21)
- 设计自由度很大的二级直耦宽带放大器电路及其工作(02-21)
- 双轴微机械陀螺仪的移动机器人运动检测系统(11-14)
- 智能救援机器人的设计(12-03)