电阻应变片的工作原理
较校
(6).测量范围宽,可以从0.005——190000m3/h。
(7).测量精度高,可达±0.5%。
使用电磁流量传感器时应注意以下几点:
[1].由于管道是绝缘体,电流在流体中流动很容易受杂波的干扰,因此必须在安装流量传感器管道的两端设置接地环,使流体接地。
[2].虽然流速对精度影响不大,为消除这种影响,应保证上流道有足够的直线长度。
[3].使用电磁流量计时,必须使管道内充满液体。最好是把管道垂直设置,让被测液体从上至下流动。
[4].测定电导率较小的液体时,由于两电极间的内部阻抗比较高,所以信号放大器要有100MΩ的输入阻抗。为保证传感器正常的工作,液体的电导率必须保证在5s/cm以上。
电磁流量传感器可以广泛应用于自来水、工业用水、农业用水、海水、污水、污泥、化学药品、食品、矿浆等流体的检测。
涡流流量传感器
一.涡流流量传感器的工作原理
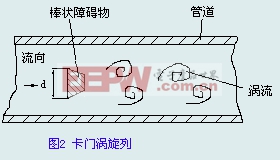
当在流体中插入棒状障碍物时,在其带侧会交替产生相互反转的涡流,在流体的下游形成规则的涡列,如图4所示,这种涡列就是流体力学中的“卡门涡旋列”。
发生涡旋的频率与流体流量有如下的关系,即
式中f——涡流的频率
St——斯托哈尔数(雷诺数在某些范围内的一定值)
v——流体的平均流速
d——插入物体正对流向的宽度
A——流路的断面积
Q——流体的流量
上式说明,St在一定的范围内,涡流频率f和流量成正比,因此只要测定出涡流的频率,就可得知流体的流量这就是涡流流量传感器的工作原理。
二.涡流流量计的结构
涡流流量计的基本结构,如图5所示,流量脊由外壳、涡流发生器和频率检测元件等组成。涡流发生器的下端沿枞向自由支撑,上端固定在外壳的孔内,通过密封圈再用压板予以固定。在涡流发生器的内部装有压电元件,用来通过体内的应力变化检测出涡流的频率。图中的涡流发生器与流体接触部分的截面为梯形,这种形状能使流速与涡流的频率具有良好的线性。当涡流发生时,其内部将产生一定的应力,这种应力经压电元件检测后,用电路对得到的信号进行处理,从而得到跟涡流频率对应的脉冲频率,最终以模拟电压的形式输出。
涡流频率的检测方法有许多种,可利用加热体的冷却方法来检测涡流非生产性器周围和内部流体流动的周期变化,也可以通过个种传感器检测流体振动所产生的力的周期变化。

三.涡流流量传感器的特性及使用
涡流流量传感器有以下特征:
(1).测量涡流频率的检测元件,一般都设置在涡流发生器的内部,与流体隔离,所以涡流流量传感器可以对所有的流体进行流量检测。
(2).在流体的通道上设置的涡流发生器是固定的,因此传感器没有运动部分,使传感器长期使用的可靠性得到保证。
(3).因为阻碍流体运动的只有一根涡流发生器,所以压力损失小。
(4).传感器测量流体的温度为-40——300℃,流体的最高压力可达30MPa。
(5).传感器测定流速的范围,液体最大为10m/s,气体最大为90m/s。
使用涡流流量传感器时应注意以下几点:
[1].当被测流体的流速偏低时,流体将产生不稳定涡流,此时应适当减小管道的口径以提高流速。
[2].当测定附着性流体时,如果涡流发生器上附着过多的流体,将会使测量误差增大。
[3].传感器安装时,应设置在管道振动小的位置,并固定在牢固可靠的支架上。
速度传感器
单位时间内位移的增量就是速度。速度包括线速度和角速度,与之相对应的就有线速度传感器和角速度传感器,我们都统称为速度传感器。
旋转式速度传感器的结构和特征
旋转式速度传感器按安装形式分为接触式和非接触式两类。
(1).接触式
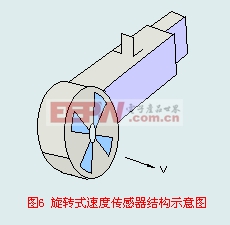
旋转式速度传感器与运动物体直接接触,这类传感器的工作原理如图6所示。当运动物体与旋转式速度传感器接触时,摩擦力带动传感器的滚轮转动。装在滚轮上的转动脉冲传感器,发送出一连串的脉冲。每个脉冲代表着一定的距离值,从而就能测出线速度V。
设D为滚轮直径,单位为MM,滚轮每转输出πD个脉冲,则一个脉冲代表着1MM的距离值.设在时间T内脉冲计数为N,则线速度V为:

转动脉冲传感器产生脉冲的方式由表及里光电、磁电、电感应等多种。
每个脉冲代表的距离(mm)称为脉冲当量。为了计算方便,脉冲当量常设定为距离mm的整数倍,这是正确使用传感器的关键。
接触式旋转速度传感器结构简单,使用方便。但是接触滚轮的直径是与运动物体始终接触着,滚轮的外周将磨损,从而影响滚轮的周长。而脉冲数对每个传感器又是固定的。影响传感器的测量精度。要提高测量精度必须在二次仪表中增加补偿电路。另外接触式难免产生滑差,滑差的存在也将影响测量的正确性。因此传感器使用中必须施加一定的正压力或着滚轮表面采用摩擦力系数大的材料,尽可能减小滑差。
- 什么是权电阻网络DAC(数模转换器)(01-24)
- 倒T型电阻网络D/A转换器(01-24)
- 运放电路设计中无源元件的选择(01-23)
- 电子连接器接触电阻测试程序(07-08)
- 输出电容器的等效串联电阻对滞环控制功率转换器的影响(07-12)
- 电阻器基本常识(07-06)