TMS320C61416控制FPGA数据加载设计(一)
目前实现加载的方法通常有两种:一种是用专用Cable通过JTAG口进行数据加载,另一种是外挂与该FPGA厂商配套的PROM芯片。前者需要在PC机上运行专用的加载软件,直接下载到FPGA片内,所以掉电数据仍然会丢失,只适用于FPGA调试阶段而不能应用于工业现场的数据加载。后者虽然可以解决数据丢失问题,但这种专用芯片成本较高,供货周期也较长(一般大于2个月),使FPGA产品的开发时间受到很大约束。根据FPGA芯片加载时序分析,本文提出了采用通过市面上常见的Flash ROM芯片替代专用PROM的方式,通过DSP的外部高速总线进行FPGA加载;既节约了系统成本,也能达到FPGA上电迅速加载的目的;特别适用于在FPGA调试后期,待固化程序的阶段。下面以两片Xilinx公司Virtex-4系列XC4VLX60芯片为例,详细介绍采用TI公司的TMS320C61416 DSP控制FPGA芯片数据加载的软硬件设计。
1 Xilinx FPGA配置原理
Virtex-4系列的FPGA芯片外部配置引脚MODE PIN(M0、M1、M2),有5种配置模式,如表1所列。

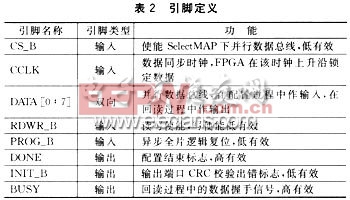
FPGA在Slave SelectMAP方式下,共用了表2所列的15个配置引脚。
1.1 配置流程
FPGA加载时序如图1所示。各配置信号必须满足其时序关系,否则配置工作无法正常完成。
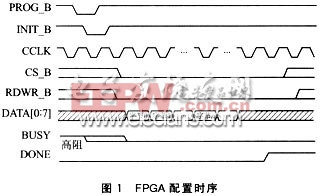
图1中,Slave SelelctMAP加载主要包括以下3个步骤:
①启动和初始化。FPGA上电正常后,通过PROG_B引脚低脉冲进行FPGA异步复位,使得FPGA内部逻辑清零。其次PROG_B上拉高,停止外部复位,INIT_B引脚会在TPOR时间段内自动产生一个由低到高的跳变,指示FPGA内部初始化完成,可以进行数据下载;同时FPGA在INIT_B的上升沿采样其模式引脚MODE PIN,决定其模式配置。
②比特流加载。INIT_B信号变高后,不需要额外的等待时间,Virtex器件就可以立即开始数据的配置。比特流数据在外部CCLK信号上升沿按字节方式置入。该过程包括同步初始化字、器件ID号校验、加载配置数据帧、CRC校验4个部分。
③STARTUP启动。在成功校验CRC码位后,比特流命令使得FPGA进入STARTUP状态。它是由8相状态机实现的。中间包括等待DCM锁相、DCI匹配等几个状态,最后FPGA释放外部DONE引脚,对外输出高阻态,由外部上拉高,指示FPGA加载成功。
1.2 文件生成
ISE生成数据文件主要有3种:BIT文件,由二进制格式进行表征逻辑设计,包括文件头和配置数据,主要用于JTAG下载电缆模式;MCS文件,为外部PROM烧写生成的下载文件,ASCII码,与前者不同的是它含有在PROM中的数据地址和校验值;BIN文件格式,由二进制表示,完全由配置数据组成,不需要作其他的提取和进制转换,只是配置前的Byte-Swapped是在CPLD中实现的。本设计采用的是BIN文件格式。
2 硬件实现
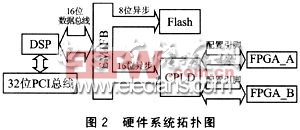
系统采用2片Xilinx Virtex-4系列的600万门的FPGA XC4VLX60。主MCU是TI公司高性能定点处理器TMS320C6416,对外有2个EMIF总线接口,分别是64位宽EMIFA和16位宽EMIFB。EMIFB上挂有8位8MB的Flash和16位CPLD:Flash做2片FPGA的BIN文件保存,之前由仿真器烧写;CPLD用于2片FPGA地址译码和DSP与FPGA配置部分的逻辑接口。整个数据流程是在DSP上电启动后,Bootloader自行引导用户程序运行。该程序负责由EMIFB总线搬移Flash空间中BIN文件,通过CPLD分别对2片FPGA进行配置加载。硬件系统拓扑图如图2所示。
3 软件设计
软件包括3部分:引导Bootloader代码,加载FPGA用户程序以及接口部分的CPLD Verilog代码。
3.1 DSP Bootloader
本系统中目标板处于FPGA调试后期,需要固化其加载程序。整板上电后,要求脱离仿真器自行加载FPGA,因此这里采用DSP的EMIF BooT方式。它是由DSP上电复位后,以默认ROM时序通过EDMA自行搬移BCE1的ROM空间前1 KB内容到片内,在其0x0地址开始运行。
一般由C编写的程序代码长度都远大于1 KB,如果只是纯粹由DSP搬移Flash前1 KB空间,这样便会丢失数据,程序无法正常运行。这里采用由汇编语言写的一个两次搬移的Bootloader程序,来引导较大的用户程序。使用汇编语言是因为其代码效率高,代码长度短(本系统中只有256字节)。两次搬移是因为第一次DSP自行搬移后的Bootloader会占用片内的0x0地址前1 KB空间,与下一步的用户程序0x0地址拷贝冲突(中断向量表必须放在0x0地址,否则会丢失中断跳转的绝对地址),且运行中的Bootloader不能覆盖自身。所以把拷贝用户程序的那部分代码放在片内较底端运行,腾出了用户空间的0x0地址。最后整体拷贝结束后,Bootloader再跳转到用户程序入口地址c_int00运行。
TMS320C61416 FPGA 数据加载 相关文章:
- TMS320C61416控制FPGA数据加载设计(二)(09-25)
- 电源管理总线的结构与优势(11-19)
- 新型灌封式6A至12A DC-DC μModule稳压器系列(11-19)
- 低电压PLD/FPGA的供电设计(01-24)
- 基于FPGA的高精度数字电源(02-12)
- 功率分配系统(PDS)设计:利用旁路电容/去耦电容(04-29)