北斗卫星导航系统行车记录仪的优化设计
位置、速度)以使用更多卫星改善DOP值(精度因子)外,采用以下组合方案进行改善:
首先,在北斗芯片冷启动定位成功后丢掉前5个点,此时的点为上次启动芯片最后一次成功定位的点位置,以避免硬件上电初期的不稳定或厂家为缩短定位时间而采取快速定位的策略导致定位不准,保持位置信息的延续性。
其次,设置速度最大阀值,若NMEA速度超过该值则直接丢弃该点。例如地面最快的跑车速度也不会超过350 km/h,若超过此值则属漂移直接丢弃该点,或两点距离(每秒取点)超过此值则丢弃后一点。
再次,设置速度最小阀值,若NMEA速度或两点相对速度小于该值则判定设备静止,强制速度为0,位置信息采用上次点数据,从而消除静态漂移。重力加速传感器感知车辆是否运动,与点火器配合使用,可获得车辆静止熄火信息,此时需设置定位信息为同一点,可在一定条件下避免静态漂移。因车速传感器无法区分拖车状态,不能作为车辆静止标志和消除漂移的参考条件。
3.2 数据处理
根据硬件特性,LPC1788自带片上NVRAM和EEPROM,另增加铁电存储器,并支持SD卡和U盘。片上NMVRM用于存放远程升级代码,设备初始值和配置参数(车辆信息、状态量配置信息、脉冲系数、初次安装日期、超速阀值等);铁电存储器用于保存临时变量(多媒体ID、驾驶员登入最后一次时间、驾证等)、0.2 s间隔的速度传感器速度、状态信号、位置信息;SD卡、U盘用于本地固件更新与参数修改,并以文件形式存放处理过的各种数据。
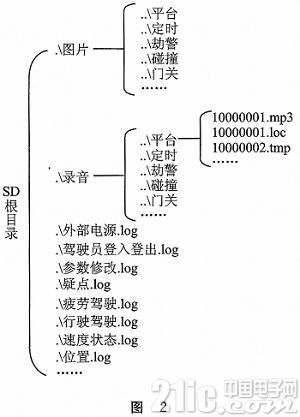
处理过的数据分别按发生事件的不同存在不同的文件里:外部电源的插拔、驾驶员登入/登出、参数修改、疑点发生、疲劳驾驶、行驶速度、位置信息。拍照和录音按不同的事件(定时、定距、劫警、平台等)也存放于各自目录下,如图2所示。
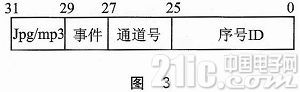
此处特别说明多媒体数据处理。多媒体数据可本地保存或立即上传监控中心。为确保实时数据完整上传,须建立临时多媒体文件存于相应目录下,平台确认接收完整后自动删除。多媒体文件可以按类型、通道、时间、事件类型的不同需求检索上传,除时间可从文件属性中获得,项目对其实行命名规则(媒体文件名规定为4字节)以识别其他要素,如图3所示。还需注意,图片数据量与拍摄场景复杂度、压缩率、象素有关,定时、定距拍摄间隔的设置应加以限制,以避免因数据量过大即进行下一个多媒体文件的操作而造成丢失数据。
处理过的数据会根据不同的需要写入SD卡中。其中,速度、位置信息需要定时写入,疑点、疲劳驾驶、拍照、速度状态等文件需等事件发生后写入。这存在一定概率的文件写冲突,造成文件乱码或存储位置错误。由于是单线程,在解析、执行操作命令时,也可能因中断响应造成漏存数据。要解决该问题,可设置存放采集数据的RAM部分冗余,在其他文件写时,采集到的数据仍可继续存于RAM中,避开写冲突。
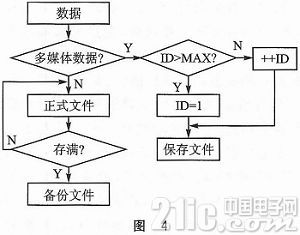
因存储空间有限,保存文件需要自清理。以位置信息文件为例,预留双倍指定容量,一为正式文件,另一为备份文件。当正式文件存满时,将正式文件的内容复制至备份文件并清空,后续数据继续存入正式文件;若正式文件再次存满,则删除备份文件,再次将正式文件内容备份并清空以做后续数据存储。流程如图4所示。
3. 3 数据传输
从图1中可以看出,M10、北斗和前面板三个串口可以同时向LPC1788发送数据。LPC1788在单线程且内存有限的情况下,会因中断响应、处理流程等原因丢失数据,如LPC1788处理照片上传时,M10录音数据需要保存。解决此类问题,可以使用每包双向确认进行可靠连接传输,但该过程复杂、运行效率不高。项目采用面向非连接协议,直接发包,除设置其中断优先级外,还需增加流量控制,为LPC1788留出处理时间,增强数据传送可靠性。
此处设置北斗数据接收中断为最高优先级,M10其次,前面板最低。M10和LPC1788分别用GPIO模拟RTS(Request to Send)可以接收数据和CTS(Clear to Send)允许发送数据。M10、LPC1788每次发送数据前,查询本地CTS是否可以发送数据。当M10、LPC1788接收数据超过阀值时,置位本地RTS,禁止对方发送数据;处理就绪,即清除本地RTS允许接收数据。因M10与LPC1788通信采用面向非连接协议,所以存在因误码而丢包的概率。可以通过监控平台发补包和命令补包,也可自行内部补包,提高上传平台效率及平台感受。以多媒体拍照数据实时上传为例,首先拍照存临时文件,然后分包传送数据,并开启缓冲发送队列。当遇到CTS为高时,将上传多媒体ID与未上传的分包序号存人队列,退出与M10的数据发送流程,并在主函数中不断轮询CTS。当CTS为低时,相关参数出队列,重新执行与M10的数据传送,
北斗卫星导航系统 行车记录仪 漂移 数据传输 数据处理 流量控制 相关文章:
- 数字可变电阻补偿稳压器的温度漂移(11-20)
- 如何解决FlexRay时钟同步的同向漂移(03-26)
- 一种低漂移对称大功率高压直流变换器的设计(06-19)
- 晶振匹配和温度漂移(09-12)
- 精密运放的零漂移和宽电源及输入电压范围技术解析(01-21)
- 削波器漂移补偿可编程增益放大器(01-22)