体内胶囊内窥镜磁场定位检测系统的设计
时间:01-14
来源:互联网
点击:
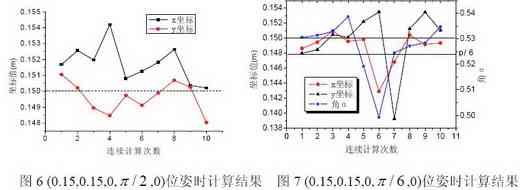
同时对于胶囊三个给定位姿状态,进行连续10次计算的结果。选择的位姿点为(0.15,0.15,0, ,0)和(0.15,0.15,0, ,0)。图6为位姿点(0.15,0.15,0, ,0)计算的结果,由图中可见,计算的坐标值x , y都在0.15上下波动,误差在±3%,而 轴坐标值和两个角度值的计算结果都非常理想,没有标出。图7为位姿点(0.15,0.15,0, ,0)计算的结果,此时胶囊磁矩方向与 轴角度为30 。从图中 坐标值波动情况来看,其误差扩大到了7%,而与 轴夹角坐标误差为5%,另外两个参数的计算结果很理想。
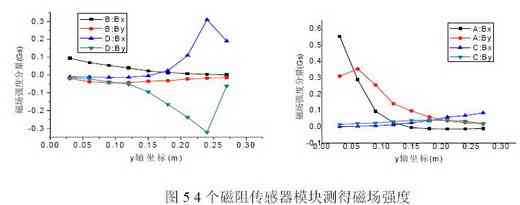
上面的测量实验和计算结果表明,设计的定位检测系统能够较准确地测出胶囊在运动过程中的磁感应强度,从而准确的定位出胶囊的空间位置和方向。同时应当注意的是当胶囊在4组磁阻传感器模块测量区域中部时,其计算结果精度较高。
6.结论
在本文中,作者提出了一种研究该定位技术的新型实验系统,利用高灵敏度的磁阻传感器模块对微胶囊空间磁场强度进行感应采集。原理和实验都证明了可以通过检测永磁体空间磁场分布来实现对微型内窥镜胶囊的定位。通过对实验结果的分析证明,该定位系统对于胶囊在运动过程中的空间位置和方向的定位具有较高的准确率,可以有效应用于微型内窥镜胶囊在体内的定位,显著提高了临床疾病诊断的准确率。
本文作者创新点:采用了高灵敏度的三轴垂直磁阻传感器模块,并结合放大和采集电路对胶囊空间磁场强度进行检测,实现准确定位。此系统比以往有更大的准确检测范围,可达到20-30cm。
MEMS 电子 传感器 电路 霍尔效应 放大器 虚拟仪器 电压 相关文章:
- 运动游戏站集锻炼、娱乐和癫痫监测于一体(04-14)
- 测压传感器介绍及在医疗电子中的应用(10-12)
- 内窥镜诊疗微型机器人发展概述及前景分析(10-17)
- 十类21世纪最值得开发的医疗器械产品(10-18)
- 家用医疗保健电子设备设计迷津指南(11-24)
- 一种双向、数字式微型无线内窥镜系统设计(01-13)