数字电源控制器UCD3138 的逐周期保护功能说明
时间:11-23
来源:互联网
点击:
作者:Neil Li, Sundy Xu --- China Telecom Application Team
摘要
UCD3138 是德州仪器(Texas Instruments)公司推出的最新一代数字电源控制器,于2012 年第一季度正式发布。相比于上一代数字电源控制器UCD30xx,其在诸多方面有着重要改进,功能更加丰富,性能更加强大。本文基于一款采用硬开关全桥(副边采用全波整流)拓扑的开关电源,详细介绍了UCD3138 的逐周期保护功能(cycle by cycle limitation)的硬件设计、软件配置和实测数据。在完成对上述功能理解的同时也可以清楚的了解到UCD3138的优势所在。本文的最后部分给出了参考文献。
1、逐周期保护功能的设计与实现
逐周期(cycle by cycle)保护功能是UCD3138 相比于UCD30xx 的一个重要改进,旨在实现原边侧的逐周期保护,在有输入电压浪涌,输出短路等场合可以实现快速响应与保护。
1.1 逐周期功能实现描述
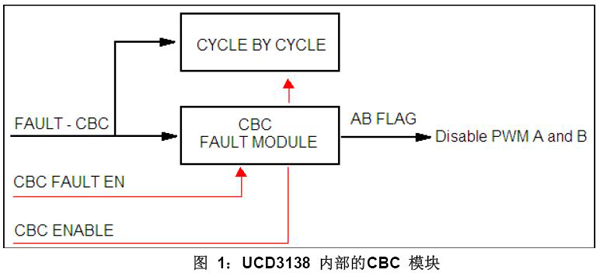
在UCD3138 芯片内部的每个DPWM 模块都有且只有一个cycle by cycle(CBC)硬件模块,如下图3 所示。当CBC 模块接收到触发信号(FAULT)后,CBC 模块会立即响应以限制当前DPWM A 和DPWM B 的占空比,这就实现了cycle by cycle 保护功能。
1.2 逐周期功能的硬件设计
如下图2 所示,该电路为原边电流检测电路。借助电流互感器(匝比为100:1),在AD04 网络处得到的电压反映了原边电流的大小,其关系式为: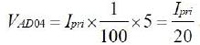
。该网络处的电压将通过模拟比较器传输到UCD3138 芯片内部。
1.3 逐周期保护功能的软件设计
逐周期保护功能的软件设计包含了模拟比较器AD04 的相关配置、AD04 与DPWM的关联、cycle by cycle相关参数的配置等几个重要部分,下文将一一进行阐述。
1) 模拟比较器AD04 的配置
下面代码完成了对模拟比较器阈值的设置,即触发CBC 的电压点。“ACOMP_D_THRESH”的分辨率为19.5mv,阈值电压设置为30(585mv)。在选定外部电阻(R17,R117)后,可微调该参数,以期得到合适阈值电压。
FaultMuxRegs.ACOMPCTRL1.bit.ACOMP_D_THRESH = 30;
2) 模拟比较器AD04 与DPWM的关联
下面代码完成了AD04(即代码中的比较器D)与DPWM0 和DPWM1 的关联。即,当电压超过AD04 阈值电压后,DPWM0 和DPWM1 的占空比会被限制。
FaultMuxRegs.DPWM0CLIM.bit.ACOMP_D_EN = 1;
FaultMuxRegs.DPWM1CLIM.bit.ACOMP_D_EN = 1;
3)Blanking time 的设置
下面代码设置了Blanking time。“BLANK_A_END”位的分辨率为4ns,因此该代码设置了Blanking time的值为100ns。
Dpwm0Regs.DPWMBLKABEG.bit.BLANK_A_BEGIN=0;
Dpwm0Regs.DPWMBLKAEND.bit.BLANK_A_END =25;
4)连续触发CBC 个数的设置
下面代码的含义是需要连续触发20 次CBC 后系统才会做出响应,可以是关机或不动作(具体响应机制需要在另一代码中设置)。
Dpwm0Regs.DPWMFLTCTRL.bit.CBC_MAX_COUNT = 20;
5)CBC 使能
下面代码为使能CBC 的关键代码。当与之关联的DPWM配置为Normal Mode 时,设置下面标志位为1,便使能了CBC 功能。
Dpwm0Regs.DPWMCTRL0.bit.CBC_ADV_CNT_EN = 1;
Dpwm0Regs.DPWMCTRL0.bit.CBC_PWM_AB_EN = 1;
6)连续触发CBC 后的响应
下面代码完成当连续触发20 次CBC 后系统的响应。当设置为1,则系统的响应是关闭驱动,同时软件状态机跳转到Idle 模式。
Dpwm0Regs.DPWMFLTCTRL.bit.CBC_FAULT_EN = 1;
1.4 逐周期保护功能的实测波形
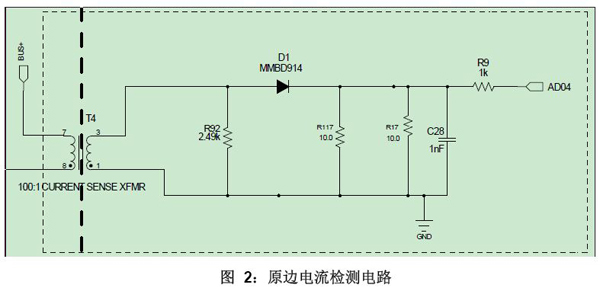
测试逐周期保护功能时,需要将副边过流保护暂时屏蔽。同时,为充分观察CBC 的效果,设置触发CBC 的响应动作为不关闭驱动,系统正常发波运行。当给系统加载到20A 并触发CBC 后,由于系统不关闭驱动,全桥原边占空比会逐渐被限制,直到变为最小占空比。
实测波形见下图3。由于触发CBC 后占空比会被限制缩小而不关机,因此输出电压会被逐渐拉低。当输出电压稳定后,占空比即被限制到了最小。最小占空比的宽度主要由Blanking time(100ns)和硬件比较器的响应时间(50ns)决定。
2、参考文献
1. UCD3138 datasheet, Texas Instruments Inc., 2011
2. UCD31xx Central Interrupt Module (CIM) Programmer's Manual, Texas Instruments Inc., 2011
3. UCD31xx Fusion Digital Power Peripherals Programmer’s Manual, Texas Instruments Inc., 2011
4. UCD31xx Miscellaneous Analog Control _MAC_, Texas Instruments Inc., 2011
摘要
UCD3138 是德州仪器(Texas Instruments)公司推出的最新一代数字电源控制器,于2012 年第一季度正式发布。相比于上一代数字电源控制器UCD30xx,其在诸多方面有着重要改进,功能更加丰富,性能更加强大。本文基于一款采用硬开关全桥(副边采用全波整流)拓扑的开关电源,详细介绍了UCD3138 的逐周期保护功能(cycle by cycle limitation)的硬件设计、软件配置和实测数据。在完成对上述功能理解的同时也可以清楚的了解到UCD3138的优势所在。本文的最后部分给出了参考文献。
1、逐周期保护功能的设计与实现
逐周期(cycle by cycle)保护功能是UCD3138 相比于UCD30xx 的一个重要改进,旨在实现原边侧的逐周期保护,在有输入电压浪涌,输出短路等场合可以实现快速响应与保护。
1.1 逐周期功能实现描述
在UCD3138 芯片内部的每个DPWM 模块都有且只有一个cycle by cycle(CBC)硬件模块,如下图3 所示。当CBC 模块接收到触发信号(FAULT)后,CBC 模块会立即响应以限制当前DPWM A 和DPWM B 的占空比,这就实现了cycle by cycle 保护功能。
1.2 逐周期功能的硬件设计
如下图2 所示,该电路为原边电流检测电路。借助电流互感器(匝比为100:1),在AD04 网络处得到的电压反映了原边电流的大小,其关系式为:
。该网络处的电压将通过模拟比较器传输到UCD3138 芯片内部。
1.3 逐周期保护功能的软件设计
逐周期保护功能的软件设计包含了模拟比较器AD04 的相关配置、AD04 与DPWM的关联、cycle by cycle相关参数的配置等几个重要部分,下文将一一进行阐述。
1) 模拟比较器AD04 的配置
下面代码完成了对模拟比较器阈值的设置,即触发CBC 的电压点。“ACOMP_D_THRESH”的分辨率为19.5mv,阈值电压设置为30(585mv)。在选定外部电阻(R17,R117)后,可微调该参数,以期得到合适阈值电压。
FaultMuxRegs.ACOMPCTRL1.bit.ACOMP_D_THRESH = 30;
2) 模拟比较器AD04 与DPWM的关联
下面代码完成了AD04(即代码中的比较器D)与DPWM0 和DPWM1 的关联。即,当电压超过AD04 阈值电压后,DPWM0 和DPWM1 的占空比会被限制。
FaultMuxRegs.DPWM0CLIM.bit.ACOMP_D_EN = 1;
FaultMuxRegs.DPWM1CLIM.bit.ACOMP_D_EN = 1;
3)Blanking time 的设置
下面代码设置了Blanking time。“BLANK_A_END”位的分辨率为4ns,因此该代码设置了Blanking time的值为100ns。
Dpwm0Regs.DPWMBLKABEG.bit.BLANK_A_BEGIN=0;
Dpwm0Regs.DPWMBLKAEND.bit.BLANK_A_END =25;
4)连续触发CBC 个数的设置
下面代码的含义是需要连续触发20 次CBC 后系统才会做出响应,可以是关机或不动作(具体响应机制需要在另一代码中设置)。
Dpwm0Regs.DPWMFLTCTRL.bit.CBC_MAX_COUNT = 20;
5)CBC 使能
下面代码为使能CBC 的关键代码。当与之关联的DPWM配置为Normal Mode 时,设置下面标志位为1,便使能了CBC 功能。
Dpwm0Regs.DPWMCTRL0.bit.CBC_ADV_CNT_EN = 1;
Dpwm0Regs.DPWMCTRL0.bit.CBC_PWM_AB_EN = 1;
6)连续触发CBC 后的响应
下面代码完成当连续触发20 次CBC 后系统的响应。当设置为1,则系统的响应是关闭驱动,同时软件状态机跳转到Idle 模式。
Dpwm0Regs.DPWMFLTCTRL.bit.CBC_FAULT_EN = 1;
1.4 逐周期保护功能的实测波形
测试逐周期保护功能时,需要将副边过流保护暂时屏蔽。同时,为充分观察CBC 的效果,设置触发CBC 的响应动作为不关闭驱动,系统正常发波运行。当给系统加载到20A 并触发CBC 后,由于系统不关闭驱动,全桥原边占空比会逐渐被限制,直到变为最小占空比。
实测波形见下图3。由于触发CBC 后占空比会被限制缩小而不关机,因此输出电压会被逐渐拉低。当输出电压稳定后,占空比即被限制到了最小。最小占空比的宽度主要由Blanking time(100ns)和硬件比较器的响应时间(50ns)决定。
2、参考文献
1. UCD3138 datasheet, Texas Instruments Inc., 2011
2. UCD31xx Central Interrupt Module (CIM) Programmer's Manual, Texas Instruments Inc., 2011
3. UCD31xx Fusion Digital Power Peripherals Programmer’s Manual, Texas Instruments Inc., 2011
4. UCD31xx Miscellaneous Analog Control _MAC_, Texas Instruments Inc., 2011
德州仪器 开关电源 电压 PWM 电路 电流 比较器 电阻 相关文章:
- 适合高效能模拟应用的线性电压稳压器(07-19)
- 电源SOC:或许好用的“疯狂”创意(07-24)
- 以太网供电芯片:合规与超规(07-25)
- 大功率LED照明恒流驱动电源的设计(10-15)
- 多重转换:冗余电源系统电流限制的一种新方法(12-24)
- TI以独特的芯片结构和散热封装叩关功率MOSFET市场(01-26)