使用 LLC 谐振转换器实现最优的数字电源控制
时间:07-13
来源:互联网
点击:
软件流程
图2显示了单级LLC转换器控制软流程,其被划分为两个部分:控制相关算法所用的高速、高优先代码和初始化及后台任务所用的低速、低优先代码。
一般而言,编写高速代码的目的是获得最大效率,实现更大带宽的控制环路。该代码常使用中断服务程序(ISR)来调用,当此时会中断后台任务。就LLC转换器而言,其开关频率可变,可能会使用两个异步运行的ISR。一个ISR用于处理控制环路算法,并以固定频率调用,目的是与采样要求和控制规定相符。第二个ISR用于处理PWM模块更新,并以PWM开关频率(变量)调用,目的是允许同步更新和最小化控制环路计算与更新之间的延迟。
当没有ISR处于活跃状态时在剩余时段执行较慢的后台循环。这也就是执行一些系统任务的时候,例如:设备检测、软启动、开/关延迟、保护机制、有源负载控制与通信等。我们建立一个任务状态机,其为后台代码的组成部分。分别使用1ms、5ms和7.5ms用户定义时段配置三个 CPU 计时器,根据这些计时器来分组(A1, A2, A3…, B1, B2, B3…, C1, C2, C3…)执行任务。在每组内,以“循环”方式执行任务。例如,如果每5ms执行一次B组,并且B组共有3项任务,则每个“B任务”会每15ms执行一次。我们可以使用C编写“慢”任务,因为使用汇编代码编写谐振转换器控制算法需要花费更多的时间。

图2: LLC谐振转换器控制软件流程图。
SR PWM计时考虑因素
同步整流器(SR)电流具有正半波正弦形状。理想的SR计时在非零正电流期间MOSFET导通,并在其他时段截止,这种操作方式与二极管一样。这意味着,SR会在电流开始时的零电流下导通,并在电流结束时的零电流下关断,从而实现零电流开关(ZCS)。
根据初级端开关计时,可以轻松地实现SR开通计时。这是因为,当初级端开关开通时,SR电流在半周期之初开始流动。通过同时或者在其相应初级端半桥PWM之后不久设置SR PWM为开通状态,可在SR开通期间实现ZCS。SR关断计时要更难实现一点。这是因为,SR关断电流零交叉点随频率变化。在谐振频率以上,SR电流实际上永远不会在半周期结束以前达到零。在这种情况下,SR关断计时刚好在半周期末尾处。尽管没有实现 ZCS,但这种方法的功耗最小。谐振频率时,SR电流在半周期末尾处达到零。这种情况下,SR关断计时也在半周期末尾处,但却可以实现 ZCS。在谐振频率以下,SR电流在半周期结束以前便达到零。
这会产生三种可能情况。第一,如果SR关断过晚,则负电流通过SR MOSFET回流,这会导致元件损坏。第二,如果SR关断过早,则达不到ZCS,并且会产生额外功耗。第三,如果SR关闭发生在零交叉点,则可以达到ZCS。就达到ZCS而言,第三种为理想情况。
设置SR关断计时的方法有很多。一种简单的方法是选择一个固定计时(相对于半周期开始或者结束),它可以确保所有频率下SR在ZCS点或者更早关闭,从而利用SR的优点,并且不损坏元件。第二种更加先进的方法是根据频率调节SR关断计时。这种方法可在所有频率下实现ZCS,但是频率突然改变后在谐振频率以下运行会出现上述前面两种情况之一,除非SR关闭计时更新的足够快。不管是这两种方法中的哪一种,都要求做实验来确定每种实现所要求的SR关断计时,而这是一项费时或者说不切实际的工作。第三种方法是直接根据SR电流电平调节SR关断计时。尽管这种方法要求使用更多的检测电路,但却可以简化开发过程,并降低计算要求。
瞬态调谐
要想保持环路调谐的简单并且不需要使用复杂的运算或者分析工具,必须通过将它们映射到一套更直观的系数来考虑自由度数目。例如,使用五个2P2Z调节器系数项(B0, B1, B2, A1, A2)时,通过将这些项映射到P、I和D系数增益(可对每个进行单独调节)可以实现简化。这种方法要求出现周期性瞬态或者干扰,然后边调节边观察输出瞬态,同时转换器电路板的内部有源负载可产生周期性干扰(参见图3)。
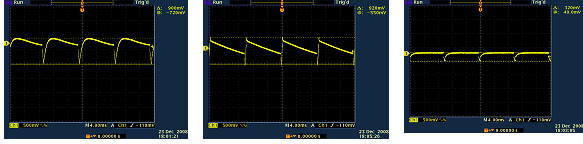
图3: 有源负载测试,使用各种调节器系数进行全负载到空负载瞬态响应调谐。
补偿器模块有两个极点和两个零点,并基于通用无限脉冲响应(IIR)滤波器结构。传递函数如下:
PID控制器的递归形式如下面差分方程式:

其中:

方程式的Z域传递函数形式为:

将其与通用式对比后,我们可以看出PID只不过是一种特殊的CNTL_2P2Z控制,其中A1 = -1并且A2 = 0。
突发模式运行
谐振转换器为轻负载或者无负载时,会有大量主电流流过变压器磁化电感以保持软开关,这会带来损耗,并极大降低轻负载效率。要想克服这个问题,可让转换器运行在突发模式下,以保持最小的转换器输入损耗;当负载降至某个值以下时,程序便进入突发模式。突发模式是一系列的开关周期,频率靠近固定频率,而占空比由一些较长的空载时段间隔。在这些时段内,开关处于关断状态,或者占空比设置情况如图4所示。利用这种方法,谐振回路电流平均值可降低至几乎可以忽略不计。另外,平均开关频率相当的低,从而降低开关损耗。

图4: 各种突发模式实施。
在这种实现中,突发模式开/关判定均基于输出纹波。由于空载条件下的纹波量并不严重,我们可以定义低于5%输出电压的带宽,来开启和关闭突发模式。另外,还可以增加软件子程序来根据系统纹波限制情况对开/关时段进行调节。对比图4a和图4b,“开”时间极大缩短,目的是提高轻负载效率。微控制器的灵活控制功能,让广大开发人员能够使用一种混合方法来实现突发模式运行,并能对占空比进行调节。
图4c显示了一个限定在10% 在的占空比。它允许系统获得更加平顺的瞬态,降低浪涌电流,并减小各个器件承受的应力。根据不同的系统规范,开发人员可在众多备选方法中选择出一种最佳的组合,旨在获得最高的轻负载或者空负载效率。
除突发模式外,混合方法还可以实现转换器的软启动。LLC转换器一开始往往会吸取大量电流,而这些电流可以通过增加开关频率(最大可高出三倍)来控制。利用混合方法,可以在相对较低的开关频率下有效地抑制浪涌电流。
图2显示了单级LLC转换器控制软流程,其被划分为两个部分:控制相关算法所用的高速、高优先代码和初始化及后台任务所用的低速、低优先代码。
一般而言,编写高速代码的目的是获得最大效率,实现更大带宽的控制环路。该代码常使用中断服务程序(ISR)来调用,当此时会中断后台任务。就LLC转换器而言,其开关频率可变,可能会使用两个异步运行的ISR。一个ISR用于处理控制环路算法,并以固定频率调用,目的是与采样要求和控制规定相符。第二个ISR用于处理PWM模块更新,并以PWM开关频率(变量)调用,目的是允许同步更新和最小化控制环路计算与更新之间的延迟。
当没有ISR处于活跃状态时在剩余时段执行较慢的后台循环。这也就是执行一些系统任务的时候,例如:设备检测、软启动、开/关延迟、保护机制、有源负载控制与通信等。我们建立一个任务状态机,其为后台代码的组成部分。分别使用1ms、5ms和7.5ms用户定义时段配置三个 CPU 计时器,根据这些计时器来分组(A1, A2, A3…, B1, B2, B3…, C1, C2, C3…)执行任务。在每组内,以“循环”方式执行任务。例如,如果每5ms执行一次B组,并且B组共有3项任务,则每个“B任务”会每15ms执行一次。我们可以使用C编写“慢”任务,因为使用汇编代码编写谐振转换器控制算法需要花费更多的时间。
图2: LLC谐振转换器控制软件流程图。
SR PWM计时考虑因素
同步整流器(SR)电流具有正半波正弦形状。理想的SR计时在非零正电流期间MOSFET导通,并在其他时段截止,这种操作方式与二极管一样。这意味着,SR会在电流开始时的零电流下导通,并在电流结束时的零电流下关断,从而实现零电流开关(ZCS)。
根据初级端开关计时,可以轻松地实现SR开通计时。这是因为,当初级端开关开通时,SR电流在半周期之初开始流动。通过同时或者在其相应初级端半桥PWM之后不久设置SR PWM为开通状态,可在SR开通期间实现ZCS。SR关断计时要更难实现一点。这是因为,SR关断电流零交叉点随频率变化。在谐振频率以上,SR电流实际上永远不会在半周期结束以前达到零。在这种情况下,SR关断计时刚好在半周期末尾处。尽管没有实现 ZCS,但这种方法的功耗最小。谐振频率时,SR电流在半周期末尾处达到零。这种情况下,SR关断计时也在半周期末尾处,但却可以实现 ZCS。在谐振频率以下,SR电流在半周期结束以前便达到零。
这会产生三种可能情况。第一,如果SR关断过晚,则负电流通过SR MOSFET回流,这会导致元件损坏。第二,如果SR关断过早,则达不到ZCS,并且会产生额外功耗。第三,如果SR关闭发生在零交叉点,则可以达到ZCS。就达到ZCS而言,第三种为理想情况。
设置SR关断计时的方法有很多。一种简单的方法是选择一个固定计时(相对于半周期开始或者结束),它可以确保所有频率下SR在ZCS点或者更早关闭,从而利用SR的优点,并且不损坏元件。第二种更加先进的方法是根据频率调节SR关断计时。这种方法可在所有频率下实现ZCS,但是频率突然改变后在谐振频率以下运行会出现上述前面两种情况之一,除非SR关闭计时更新的足够快。不管是这两种方法中的哪一种,都要求做实验来确定每种实现所要求的SR关断计时,而这是一项费时或者说不切实际的工作。第三种方法是直接根据SR电流电平调节SR关断计时。尽管这种方法要求使用更多的检测电路,但却可以简化开发过程,并降低计算要求。
瞬态调谐
要想保持环路调谐的简单并且不需要使用复杂的运算或者分析工具,必须通过将它们映射到一套更直观的系数来考虑自由度数目。例如,使用五个2P2Z调节器系数项(B0, B1, B2, A1, A2)时,通过将这些项映射到P、I和D系数增益(可对每个进行单独调节)可以实现简化。这种方法要求出现周期性瞬态或者干扰,然后边调节边观察输出瞬态,同时转换器电路板的内部有源负载可产生周期性干扰(参见图3)。
图3: 有源负载测试,使用各种调节器系数进行全负载到空负载瞬态响应调谐。
补偿器模块有两个极点和两个零点,并基于通用无限脉冲响应(IIR)滤波器结构。传递函数如下:
PID控制器的递归形式如下面差分方程式:
其中:
方程式的Z域传递函数形式为:
将其与通用式对比后,我们可以看出PID只不过是一种特殊的CNTL_2P2Z控制,其中A1 = -1并且A2 = 0。
突发模式运行
谐振转换器为轻负载或者无负载时,会有大量主电流流过变压器磁化电感以保持软开关,这会带来损耗,并极大降低轻负载效率。要想克服这个问题,可让转换器运行在突发模式下,以保持最小的转换器输入损耗;当负载降至某个值以下时,程序便进入突发模式。突发模式是一系列的开关周期,频率靠近固定频率,而占空比由一些较长的空载时段间隔。在这些时段内,开关处于关断状态,或者占空比设置情况如图4所示。利用这种方法,谐振回路电流平均值可降低至几乎可以忽略不计。另外,平均开关频率相当的低,从而降低开关损耗。
图4: 各种突发模式实施。
在这种实现中,突发模式开/关判定均基于输出纹波。由于空载条件下的纹波量并不严重,我们可以定义低于5%输出电压的带宽,来开启和关闭突发模式。另外,还可以增加软件子程序来根据系统纹波限制情况对开/关时段进行调节。对比图4a和图4b,“开”时间极大缩短,目的是提高轻负载效率。微控制器的灵活控制功能,让广大开发人员能够使用一种混合方法来实现突发模式运行,并能对占空比进行调节。
图4c显示了一个限定在10% 在的占空比。它允许系统获得更加平顺的瞬态,降低浪涌电流,并减小各个器件承受的应力。根据不同的系统规范,开发人员可在众多备选方法中选择出一种最佳的组合,旨在获得最高的轻负载或者空负载效率。
除突发模式外,混合方法还可以实现转换器的软启动。LLC转换器一开始往往会吸取大量电流,而这些电流可以通过增加开关频率(最大可高出三倍)来控制。利用混合方法,可以在相对较低的开关频率下有效地抑制浪涌电流。
MCU 嵌入式 C语言 电压 电流 DSP ADC PWM 比较器 变压器 电感 二极管 电路 MOSFET 滤波器 相关文章:
- 电源监控器IMP809/810及其应用(06-11)
- AD7656的原理及在继电保护产品中的应用(06-18)
- 高可靠MCU电源设计(06-12)
- 如何延长基于微控制器设计的电池寿命(06-24)
- 利用电压跟踪控制器提高多电源系统可靠性(07-01)
- 基于AT89C52的励磁调节器的设计与实现(07-23)